Lecture 8. Neural Networks#
How to train your neurons
Joaquin Vanschoren
Show code cell source
# Note: You'll need to install tensorflow-addons. One of these should work
# !pip install tensorflow_addons
# !pip install tfa-nightly
# Note: AdaMax is not yet supported in tensorflow-metal
Show code cell source
# Auto-setup when running on Google Colab
import os
if 'google.colab' in str(get_ipython()) and not os.path.exists('/content/master'):
!git clone -q https://github.com/ML-course/master.git /content/master
!pip --quiet install -r /content/master/requirements_colab.txt
%cd master/notebooks
# Global imports and settings
%matplotlib inline
from preamble import *
interactive = True # Set to True for interactive plots
if interactive:
fig_scale = 0.5
plt.rcParams.update(print_config)
else: # For printing
fig_scale = 0.4
plt.rcParams.update(print_config)
Overview#
Neural architectures
Training neural nets
Forward pass: Tensor operations
Backward pass: Backpropagation
Neural network design:
Activation functions
Weight initialization
Optimizers
Neural networks in practice
Model selection
Early stopping
Memorization capacity and information bottleneck
L1/L2 regularization
Dropout
Batch normalization
Show code cell source
def draw_neural_net(ax, layer_sizes, draw_bias=False, labels=False, activation=False, sigmoid=False,
weight_count=False, random_weights=False, show_activations=False, figsize=(4, 4)):
"""
Draws a dense neural net for educational purposes
Parameters:
ax: plot axis
layer_sizes: array with the sizes of every layer
draw_bias: whether to draw bias nodes
labels: whether to draw labels for the weights and nodes
activation: whether to show the activation function inside the nodes
sigmoid: whether the last activation function is a sigmoid
weight_count: whether to show the number of weights and biases
random_weights: whether to show random weights as colored lines
show_activations: whether to show a variable for the node activations
scale_ratio: ratio of the plot dimensions, e.g. 3/4
"""
figsize = (figsize[0]*fig_scale, figsize[1]*fig_scale)
left, right, bottom, top = 0.1, 0.89*figsize[0]/figsize[1], 0.1, 0.89
n_layers = len(layer_sizes)
v_spacing = (top - bottom)/float(max(layer_sizes))
h_spacing = (right - left)/float(len(layer_sizes) - 1)
colors = ['greenyellow','cornflowerblue','lightcoral']
w_count, b_count = 0, 0
ax.set_xlim(0, figsize[0]/figsize[1])
ax.axis('off')
ax.set_aspect('equal')
txtargs = {"fontsize":12*fig_scale, "verticalalignment":'center', "horizontalalignment":'center', "zorder":5}
# Draw biases by adding a node to every layer except the last one
if draw_bias:
layer_sizes = [x+1 for x in layer_sizes]
layer_sizes[-1] = layer_sizes[-1] - 1
# Nodes
for n, layer_size in enumerate(layer_sizes):
layer_top = v_spacing*(layer_size - 1)/2. + (top + bottom)/2.
node_size = v_spacing/len(layer_sizes) if activation and n!=0 else v_spacing/3.
if n==0:
color = colors[0]
elif n==len(layer_sizes)-1:
color = colors[2]
else:
color = colors[1]
for m in range(layer_size):
ax.add_artist(plt.Circle((n*h_spacing + left, layer_top - m*v_spacing), radius=node_size,
color=color, ec='k', zorder=4, linewidth=fig_scale))
b_count += 1
nx, ny = n*h_spacing + left, layer_top - m*v_spacing
nsx, nsy = [n*h_spacing + left,n*h_spacing + left], [layer_top - m*v_spacing - 0.5*node_size*2,layer_top - m*v_spacing + 0.5*node_size*2]
if draw_bias and m==0 and n<len(layer_sizes)-1:
ax.text(nx, ny, r'$1$', **txtargs)
elif labels and n==0:
ax.text(n*h_spacing + left,layer_top + v_spacing/1.5, 'input', **txtargs)
ax.text(nx, ny, r'$x_{}$'.format(m), **txtargs)
elif labels and n==len(layer_sizes)-1:
if activation:
if sigmoid:
ax.text(n*h_spacing + left,layer_top - m*v_spacing, r"$z \;\;\; \sigma$", **txtargs)
else:
ax.text(n*h_spacing + left,layer_top - m*v_spacing, r"$z_{} \;\; g$".format(m), **txtargs)
ax.add_artist(plt.Line2D(nsx, nsy, c='k', zorder=6))
if show_activations:
ax.text(n*h_spacing + left + 1.5*node_size,layer_top - m*v_spacing, r"$\hat{y}$", fontsize=12*fig_scale,
verticalalignment='center', horizontalalignment='left', zorder=5, c='r')
else:
ax.text(nx, ny, r'$o_{}$'.format(m), **txtargs)
ax.text(n*h_spacing + left,layer_top + v_spacing, 'output', **txtargs)
elif labels:
if activation:
ax.text(n*h_spacing + left,layer_top - m*v_spacing, r"$z_{} \;\; f$".format(m), **txtargs)
ax.add_artist(plt.Line2D(nsx, nsy, c='k', zorder=6))
if show_activations:
ax.text(n*h_spacing + left + node_size*1.2 ,layer_top - m*v_spacing, r"$a_{}$".format(m), fontsize=12*fig_scale,
verticalalignment='center', horizontalalignment='left', zorder=5, c='b')
else:
ax.text(nx, ny, r'$h_{}$'.format(m), **txtargs)
# Edges
for n, (layer_size_a, layer_size_b) in enumerate(zip(layer_sizes[:-1], layer_sizes[1:])):
layer_top_a = v_spacing*(layer_size_a - 1)/2. + (top + bottom)/2.
layer_top_b = v_spacing*(layer_size_b - 1)/2. + (top + bottom)/2.
for m in range(layer_size_a):
for o in range(layer_size_b):
if not (draw_bias and o==0 and len(layer_sizes)>2 and n<layer_size_b-1):
xs = [n*h_spacing + left, (n + 1)*h_spacing + left]
ys = [layer_top_a - m*v_spacing, layer_top_b - o*v_spacing]
color = 'k' if not random_weights else plt.cm.bwr(np.random.random())
ax.add_artist(plt.Line2D(xs, ys, c=color, alpha=0.6))
if not (draw_bias and m==0):
w_count += 1
if labels and not random_weights:
wl = r'$w_{{{},{}}}$'.format(m,o) if layer_size_b>1 else r'$w_{}$'.format(m)
ax.text(xs[0]+np.diff(xs)/2, np.mean(ys)-np.diff(ys)/9, wl, ha='center', va='center',
fontsize=12*fig_scale)
# Count
if weight_count:
b_count = b_count - layer_sizes[0]
if draw_bias:
b_count = b_count - (len(layer_sizes) - 2)
ax.text(right*1.05, bottom, "{} weights, {} biases".format(w_count, b_count), ha='center', va='center')
Architecture#
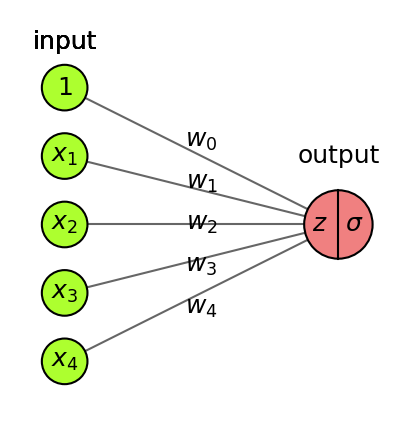
Logistic regression, drawn in a different, neuro-inspired, way
Linear model: inner product (\(z\)) of input vector \(\mathbf{x}\) and weight vector \(\mathbf{w}\), plus bias \(w_0\)
Logistic (or sigmoid) function maps the output to a probability in [0,1]
Uses log loss (cross-entropy) and gradient descent to learn the weights
Show code cell source
fig = plt.figure(figsize=(3*fig_scale,3*fig_scale))
ax = fig.gca()
draw_neural_net(ax, [4, 1], activation=True, draw_bias=True, labels=True, sigmoid=True)
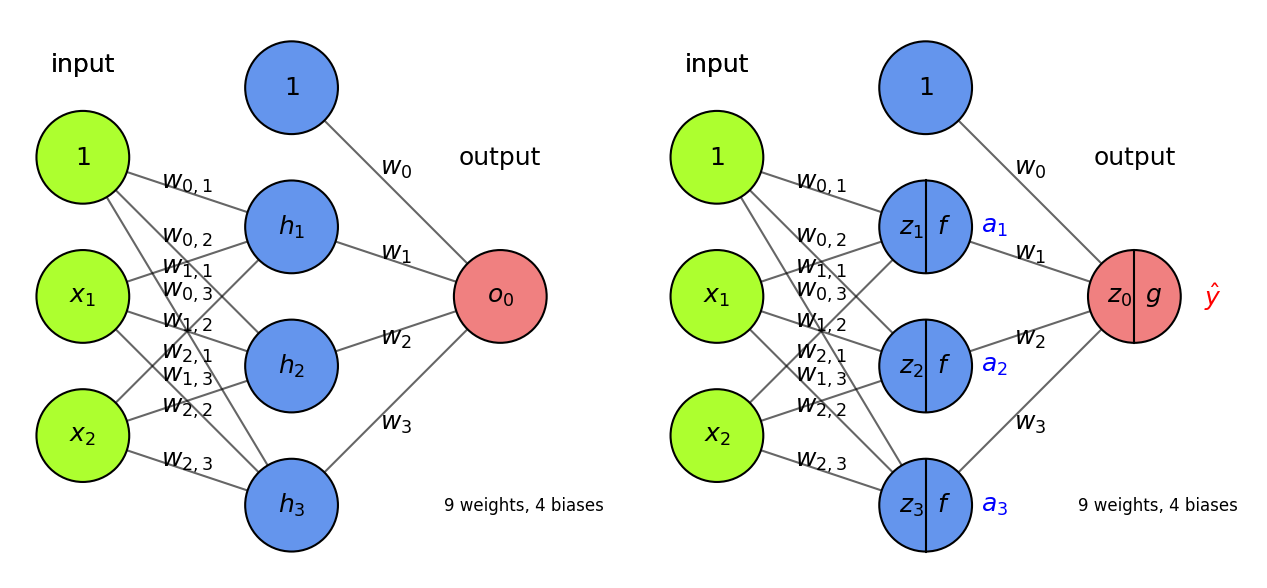
Basic Architecture#
Add one (or more) hidden layers \(h\) with \(k\) nodes (or units, cells, neurons)
Every ‘neuron’ is a tiny function, the network is an arbitrarily complex function
Weights \(w_{i,j}\) between node \(i\) and node \(j\) form a weight matrix \(\mathbf{W}^{(l)}\) per layer \(l\)
Every neuron weights the inputs \(\mathbf{x}\) and passes it through a non-linear activation function
Activation functions (\(f,g\)) can be different per layer, output \(\mathbf{a}\) is called activation $\(\color{blue}{h(\mathbf{x})} = \color{blue}{\mathbf{a}} = f(\mathbf{z}) = f(\mathbf{W}^{(1)} \color{green}{\mathbf{x}}+\mathbf{w}^{(1)}_0) \quad \quad \color{red}{o(\mathbf{x})} = g(\mathbf{W}^{(2)} \color{blue}{\mathbf{a}}+\mathbf{w}^{(2)}_0)\)$
Show code cell source
fig, axes = plt.subplots(1,2, figsize=(10*fig_scale,5*fig_scale))
draw_neural_net(axes[0], [2, 3, 1], draw_bias=True, labels=True, weight_count=True, figsize=(4, 4))
draw_neural_net(axes[1], [2, 3, 1], activation=True, show_activations=True, draw_bias=True,
labels=True, weight_count=True, figsize=(4, 4))
More layers#
Add more layers, and more nodes per layer, to make the model more complex
For simplicity, we don’t draw the biases (but remember that they are there)
In dense (fully-connected) layers, every previous layer node is connected to all nodes
The output layer can also have multiple nodes (e.g. 1 per class in multi-class classification)
Show code cell source
import ipywidgets as widgets
from ipywidgets import interact, interact_manual
@interact
def plot_dense_net(nr_layers=(0,6,1), nr_nodes=(1,12,1)):
fig = plt.figure(figsize=(10*fig_scale, 5*fig_scale))
ax = fig.gca()
ax.axis('off')
hidden = [nr_nodes]*nr_layers
draw_neural_net(ax, [5] + hidden + [5], weight_count=True, figsize=(6, 4));
Show code cell source
if not interactive:
plot_dense_net(nr_layers=6, nr_nodes=10)
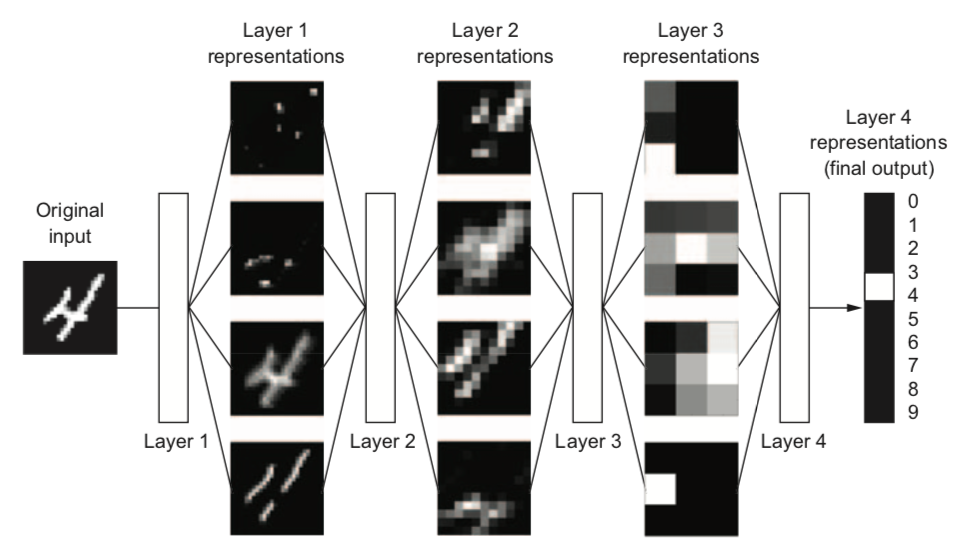
Why layers?#
Each layer acts as a filter and learns a new representation of the data
Subsequent layers can learn iterative refinements
Easier that learning a complex relationship in one go
Example: for image input, each layer yields new (filtered) images
Can learn multiple mappings at once: weight tensor \(\mathit{W}\) yields activation tensor \(\mathit{A}\)
From low-level patterns (edges, end-points, …) to combinations thereof
Each neuron ‘lights up’ if certain patterns occur in the input
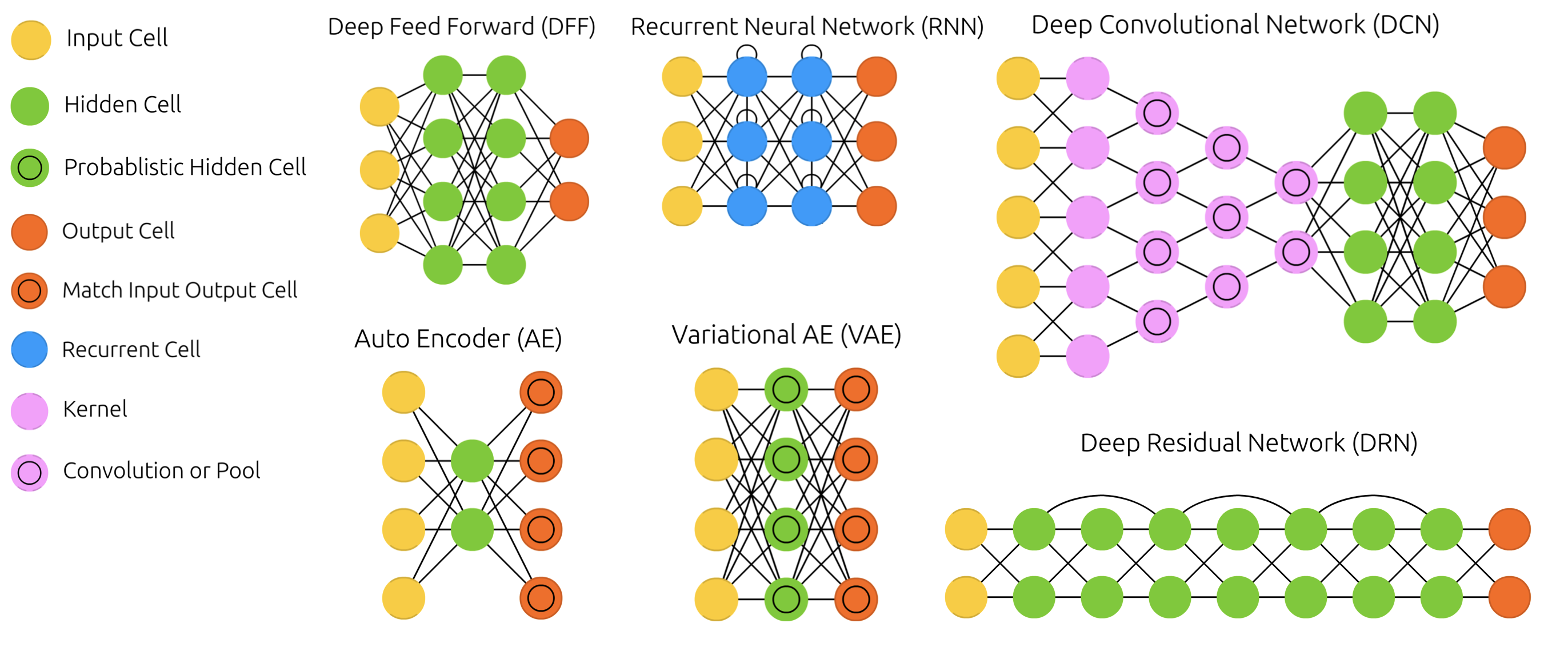
Other architectures#
There exist MANY types of networks for many different tasks
Convolutional nets for image data, Recurrent nets for sequential data,…
Also used to learn representations (embeddings), generate new images, text,…
Training Neural Nets#
Design the architecture, choose activation functions (e.g. sigmoids)
Choose a way to initialize the weights (e.g. random initialization)
Choose a loss function (e.g. log loss) to measure how well the model fits training data
Choose an optimizer (typically an SGD variant) to update the weights
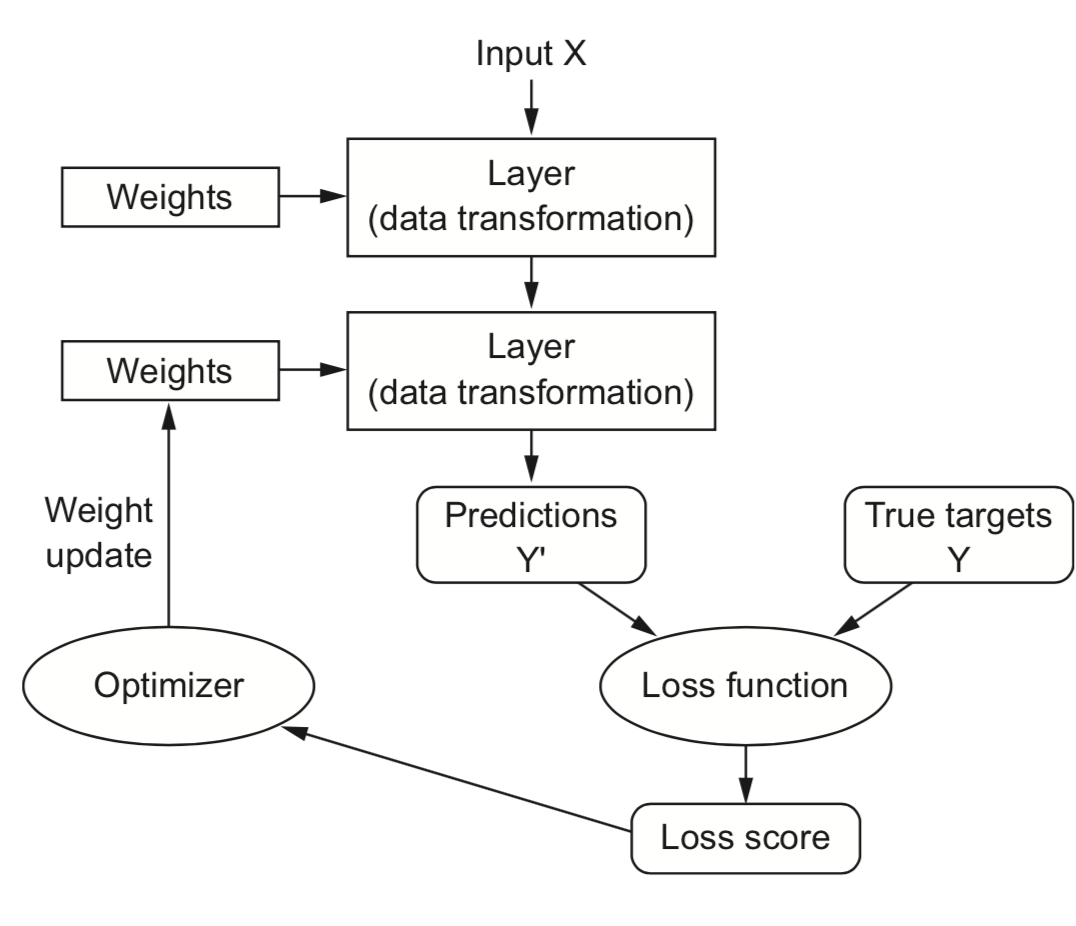
Mini-batch Stochastic Gradient Descent (recap)#
Draw a batch of batch_size training data \(\mathbf{X}\) and \(\mathbf{y}\)
Forward pass : pass \(\mathbf{X}\) though the network to yield predictions \(\mathbf{\hat{y}}\)
Compute the loss \(\mathcal{L}\) (mismatch between \(\mathbf{\hat{y}}\) and \(\mathbf{y}\))
Backward pass : Compute the gradient of the loss with regard to every weight
Backpropagate the gradients through all the layers
Update \(W\): \(W_{(i+1)} = W_{(i)} - \frac{\partial L(x, W_{(i)})}{\partial W} * \eta\)
Repeat until n passes (epochs) are made through the entire training set
Show code cell source
# TODO: show the actual weight updates
@interact
def draw_updates(iteration=(1,100,1)):
fig, ax = plt.subplots(1, 1, figsize=(6*fig_scale, 4*fig_scale))
np.random.seed(iteration)
draw_neural_net(ax, [6,5,5,3], labels=True, random_weights=True, show_activations=True, figsize=(6, 4));
Show code cell source
if not interactive:
draw_updates(iteration=1)
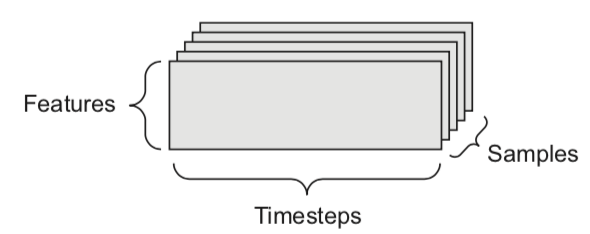
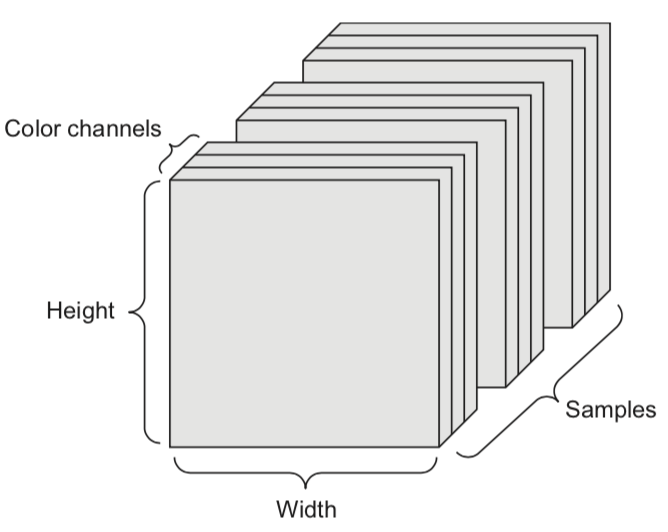
Forward pass#
We can naturally represent the data as tensors
Numerical n-dimensional array (with n axes)
2D tensor: matrix (samples, features)
3D tensor: time series (samples, timesteps, features)
4D tensor: color images (samples, height, width, channels)
5D tensor: video (samples, frames, height, width, channels)
Tensor operations#
The operations that the network performs on the data can be reduced to a series of tensor operations
These are also much easier to run on GPUs
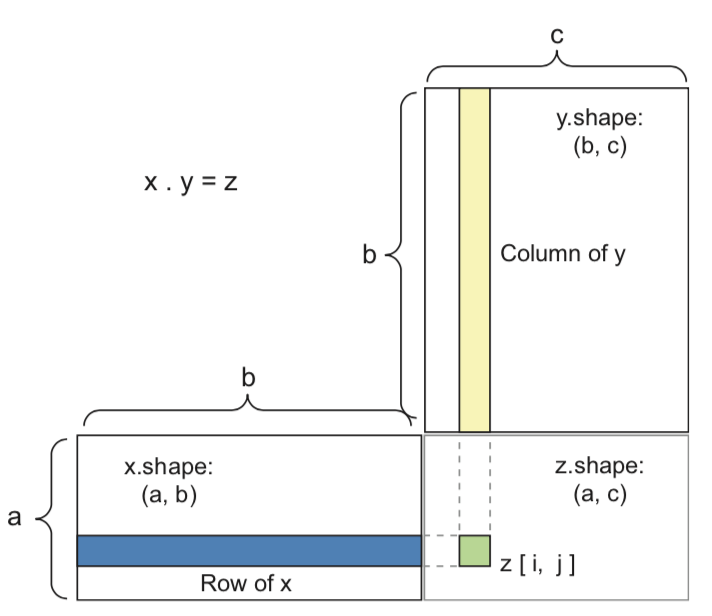
A dense layer with sigmoid activation, input tensor \(\mathbf{X}\), weight tensor \(\mathbf{W}\), bias \(\mathbf{b}\):
y = sigmoid(np.dot(X, W) + b)
Tensor dot product for 2D inputs (\(a\) samples, \(b\) features, \(c\) hidden nodes)
Element-wise operations#
Activation functions and addition are element-wise operations:
def sigmoid(x):
return 1/(1 + np.exp(-x))
def add(x, y):
return x + y
Note: if y has a lower dimension than x, it will be broadcasted: axes are added to match the dimensionality, and y is repeated along the new axes
>>> np.array([[1,2],[3,4]]) + np.array([10,20])
array([[11, 22],
[13, 24]])
Backward pass (backpropagation)#
For last layer, compute gradient of the loss function \(\mathcal{L}\) w.r.t all weights of layer \(l\)
Sum up the gradients for all \(\mathbf{x}_j\) in minibatch: \(\sum_{j} \frac{\partial \mathcal{L}(\mathbf{x}_j,y_j)}{\partial W^{(l)}}\)
Update all weights in a layer at once (with learning rate \(\eta\)): \(W_{(i+1)}^{(l)} = W_{(i)}^{(l)} - \eta \sum_{j} \frac{\partial \mathcal{L}(\mathbf{x}_j,y_j)}{\partial W_{(i)}^{(l)}}\)
Repeat for next layer, iterating backwards (most efficient, avoids redundant calculations)
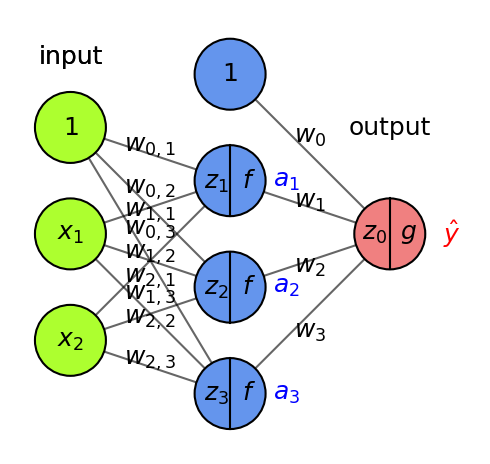
Example#
Imagine feeding a single data point, output is \(\hat{y} = g(z) = g(w_0 + w_1 * a_1 + w_2 * a_2 +... + w_p * a_p)\)
Decrease loss by updating weights:
Update the weights of last layer to maximize improvement: \(w_{i,(new)} = w_{i} - \frac{\partial \mathcal{L}}{\partial w_i} * \eta\)
To compute gradient \(\frac{\partial \mathcal{L}}{\partial w_i}\) we need the chain rule: \(f(g(x)) = f'(g(x)) * g'(x)\) $\(\frac{\partial \mathcal{L}}{\partial w_i} = \color{red}{\frac{\partial \mathcal{L}}{\partial g}} \color{blue}{\frac{\partial \mathcal{g}}{\partial z_0}} \color{green}{\frac{\partial \mathcal{z_0}}{\partial w_i}}\)$
E.g., with \(\mathcal{L} = \frac{1}{2}(y-\hat{y})^2\) and sigmoid \(\sigma\): \(\frac{\partial \mathcal{L}}{\partial w_i} = \color{red}{(y - \hat{y})} * \color{blue}{\sigma'(z_0)} * \color{green}{a_i}\)
Show code cell source
fig = plt.figure(figsize=(4*fig_scale, 3.5*fig_scale))
ax = fig.gca()
draw_neural_net(ax, [2, 3, 1], activation=True, draw_bias=True, labels=True,
show_activations=True)
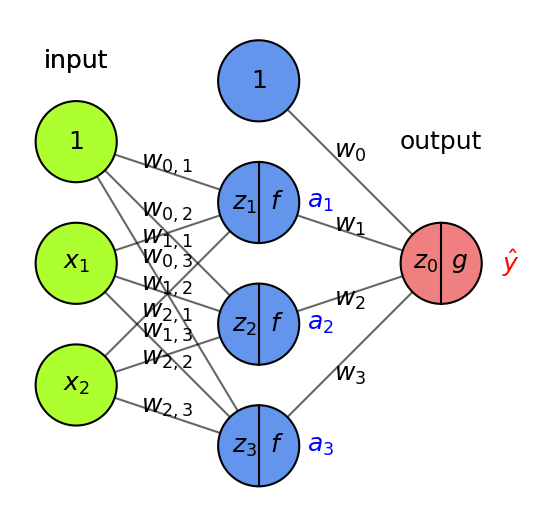
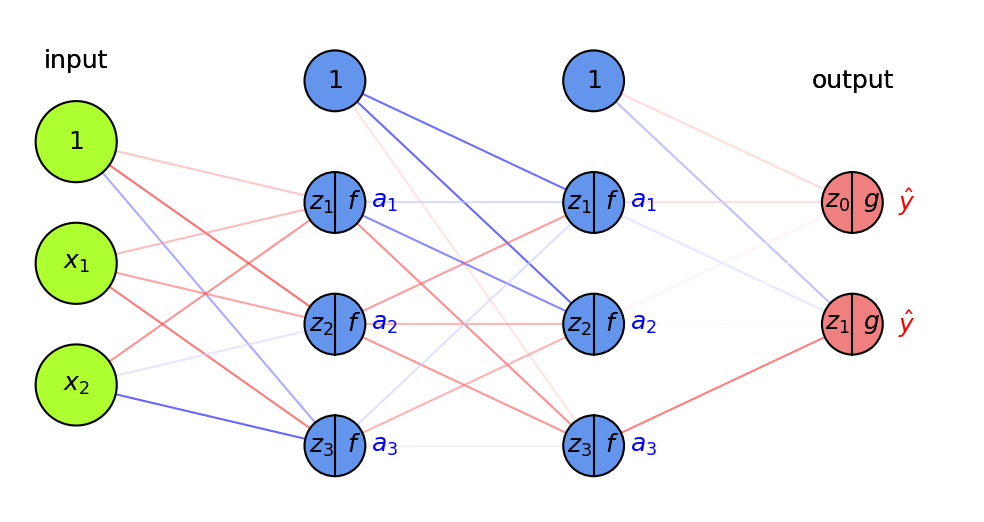
Backpropagation (2)#
Another way to decrease the loss \(\mathcal{L}\) is to update the activations \(a_i\)
To update \(a_i = f(z_i)\), we need to update the weights of the previous layer
We want to nudge \(a_i\) in the right direction by updating \(w_{i,j}\): $\(\frac{\partial \mathcal{L}}{\partial w_{i,j}} = \frac{\partial \mathcal{L}}{\partial a_i} \frac{\partial a_i}{\partial z_i} \frac{\partial \mathcal{z_i}}{\partial w_{i,j}} = \left( \frac{\partial \mathcal{L}}{\partial g} \frac{\partial \mathcal{g}}{\partial z_0} \frac{\partial \mathcal{z_0}}{\partial a_i} \right) \frac{\partial a_i}{\partial z_i} \frac{\partial \mathcal{z_i}}{\partial w_{i,j}}\)$
We know \(\frac{\partial \mathcal{L}}{\partial g}\) and \(\frac{\partial \mathcal{g}}{\partial z_0}\) from the previous step, \(\frac{\partial \mathcal{z_0}}{\partial a_i} = w_i\), \(\frac{\partial a_i}{\partial z_i} = f'\) and \(\frac{\partial \mathcal{z_i}}{\partial w_{i,j}} = x_j\)
Show code cell source
fig = plt.figure(figsize=(4*fig_scale, 4*fig_scale))
ax = fig.gca()
draw_neural_net(ax, [2, 3, 1], activation=True, draw_bias=True, labels=True,
show_activations=True)
Backpropagation (3)#
With multiple output nodes, \(\mathcal{L}\) is the sum of all per-output (per-class) losses
\(\frac{\partial \mathcal{L}}{\partial a_i}\) is sum of the gradients for every output
Per layer, sum up gradients for every point \(\mathbf{x}\) in the batch: \(\sum_{j} \frac{\partial \mathcal{L}(\mathbf{x}_j,y_j)}{\partial W}\)
Update all weights of every layer \(l\)
\(W_{(i+1)}^{(l)} = W_{(i)}^{(l)} - \eta \sum_{j} \frac{\partial \mathcal{L}(\mathbf{x}_j,y_j)}{\partial W_{(i)}^{(l)}}\)
Repeat with a new batch of data until loss converges
Show code cell source
fig = plt.figure(figsize=(8*fig_scale, 4*fig_scale))
ax = fig.gca()
draw_neural_net(ax, [2, 3, 3, 2], activation=True, draw_bias=True, labels=True,
random_weights=True, show_activations=True, figsize=(8, 4))
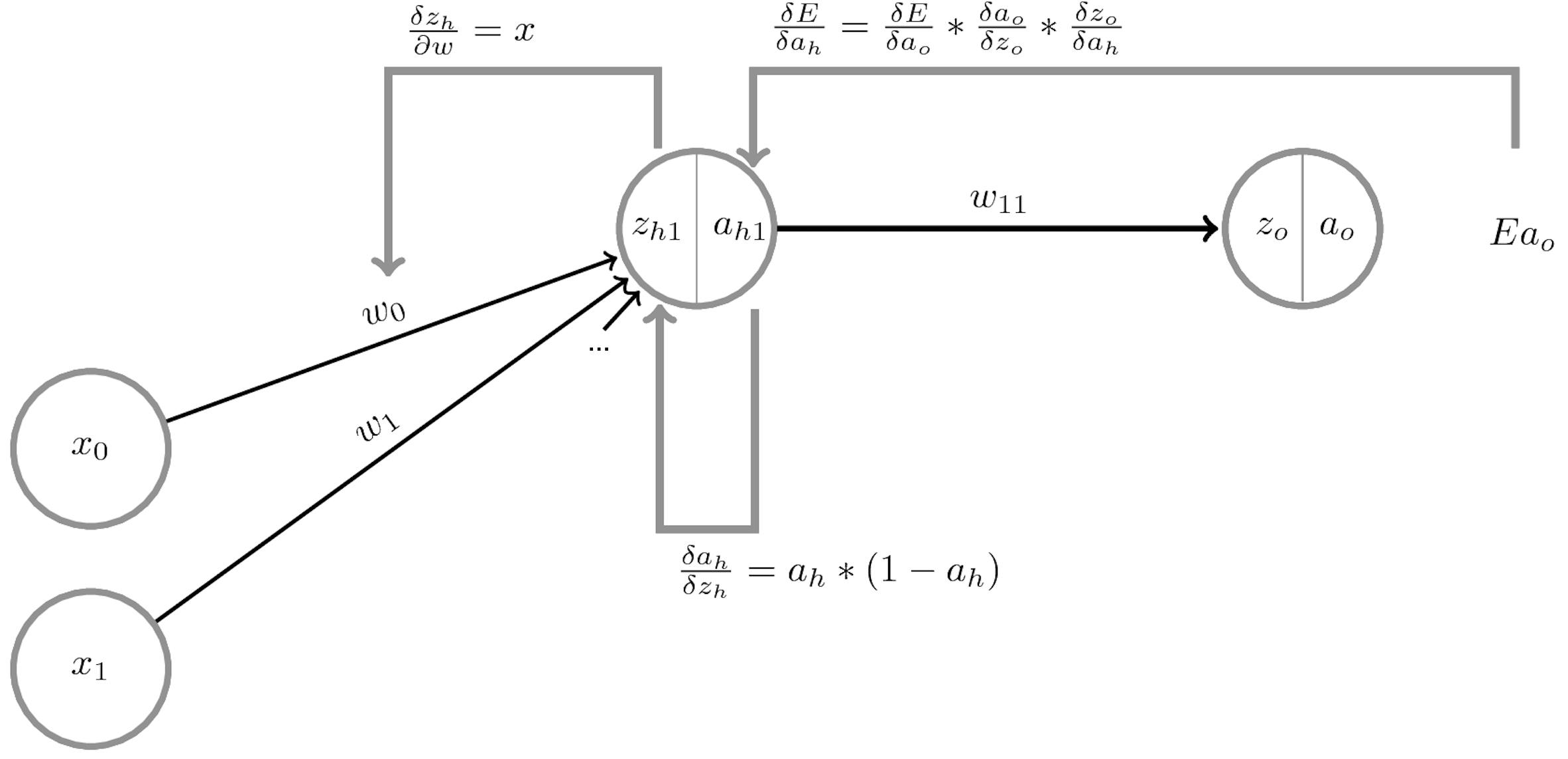
Summary#
The network output \(a_o\) is defined by the weights \(W^{(o)}\) and biases \(\mathbf{b}^{(o)}\) of the output layer, and
The activations of a hidden layer \(h_1\) with activation function \(a_{h_1}\), weights \(W^{(1)}\) and biases \(\mathbf{b^{(1)}}\):
Minimize the loss by SGD. For layer \(l\), compute \(\frac{\partial \mathcal{L}(a_o(x))}{\partial W_l}\) and \(\frac{\partial \mathcal{L}(a_o(x))}{\partial b_{l,i}}\) using the chain rule
Decomposes into gradient of layer above, gradient of activation function, gradient of layer input:
Weight initialization#
Initializing weights to 0 is bad: all gradients in layer will be identical (symmetry)
Too small random weights shrink activations to 0 along the layers (vanishing gradient)
Too large random weights multiply along layers (exploding gradient, zig-zagging)
Ideal: small random weights + variance of input and output gradients remains the same
Glorot/Xavier initialization (for tanh): randomly sample from \(N(0,\sigma), \sigma = \sqrt{\frac{2}{\text{fan_in + fan_out}}}\)
fan_in: number of input units, fan_out: number of output units
He initialization (for ReLU): randomly sample from \(N(0,\sigma), \sigma = \sqrt{\frac{2}{\text{fan_in}}}\)
Uniform sampling (instead of \(N(0,\sigma)\)) for deeper networks (w.r.t. vanishing gradients)
Show code cell source
fig, ax = plt.subplots(1,1, figsize=(6*fig_scale, 3*fig_scale))
draw_neural_net(ax, [3, 5, 5, 5, 5, 5, 3], random_weights=True, figsize=(6, 3))
Weight initialization: transfer learning#
Instead of starting from scratch, start from weights previously learned from similar tasks
This is, to a big extent, how humans learn so fast
Transfer learning: learn weights on task T, transfer them to new network
Weights can be frozen, or finetuned to the new data
Only works if the previous task is ‘similar’ enough
Generally, weights learned on very diverse data (e.g. ImageNet) transfer better
Meta-learning: learn a good initialization across many related tasks
import tensorflow as tf
import tensorflow_addons as tfa
# Toy surface
def f(x, y):
return (1.5 - x + x*y)**2 + (2.25 - x + x*y**2)**2 + (2.625 - x + x*y**3)**2
# Tensorflow optimizers
sgd = tf.optimizers.SGD(0.01)
lr_schedule = tf.optimizers.schedules.ExponentialDecay(0.02,decay_steps=100,decay_rate=0.96)
sgd_decay = tf.optimizers.SGD(learning_rate=lr_schedule)
#sgd_cyclic = tfa.optimizers.CyclicalLearningRate(initial_learning_rate= 0.1, maximal_learning_rate= 0.5, step_size=0.05)
clr_schedule = tfa.optimizers.CyclicalLearningRate(initial_learning_rate=1e-4, maximal_learning_rate= 0.1,
step_size=100, scale_fn=lambda x : x)
sgd_cyclic = tf.optimizers.SGD(learning_rate=clr_schedule)
momentum = tf.optimizers.SGD(0.005, momentum=0.9, nesterov=False)
nesterov = tf.optimizers.SGD(0.005, momentum=0.9, nesterov=True)
adagrad = tf.optimizers.Adagrad(0.4)
#adamax = tf.optimizers.Adamax(learning_rate=0.5, beta_1=0.9, beta_2=0.999) # AdaMax is still not supported in tensorflow-metal
#adadelta = tf.optimizers.Adadelta(learning_rate=1.0)
rmsprop = tf.optimizers.RMSprop(learning_rate=0.1)
#rmsprop_momentum = tf.optimizers.RMSprop(learning_rate=0.1, momentum=0.9)
adam = tf.optimizers.Adam(learning_rate=0.2, beta_1=0.9, beta_2=0.999, epsilon=1e-8)
optimizers = [sgd, sgd_decay, momentum, nesterov, adagrad, rmsprop, adam, sgd_cyclic] #, adamax]
opt_names = ['sgd', 'sgd_decay', 'momentum', 'nesterov', 'adagrad', 'rmsprop', 'adam', 'sgd_cyclic'] #,'adamax']
cmap = plt.cm.get_cmap('tab10')
colors = [cmap(x/10) for x in range(10)]
# Training
all_paths = []
for opt, name in zip(optimizers, opt_names):
x = tf.Variable(0.8)
y = tf.Variable(1.6)
x_history = []
y_history = []
loss_prev = 0.0
max_steps = 100
for step in range(max_steps):
with tf.GradientTape() as g:
loss = f(x, y)
x_history.append(x.numpy())
y_history.append(y.numpy())
grads = g.gradient(loss, [x, y])
opt.apply_gradients(zip(grads, [x, y]))
if np.abs(loss_prev - loss.numpy()) < 1e-6:
break
loss_prev = loss.numpy()
x_history = np.array(x_history)
y_history = np.array(y_history)
path = np.concatenate((np.expand_dims(x_history, 1), np.expand_dims(y_history, 1)), axis=1).T
all_paths.append(path)
Metal device set to: Apple M1 Pro
2023-09-22 09:09:17.551679: I tensorflow/core/common_runtime/pluggable_device/pluggable_device_factory.cc:306] Could not identify NUMA node of platform GPU ID 0, defaulting to 0. Your kernel may not have been built with NUMA support.
2023-09-22 09:09:17.551955: I tensorflow/core/common_runtime/pluggable_device/pluggable_device_factory.cc:272] Created TensorFlow device (/job:localhost/replica:0/task:0/device:GPU:0 with 0 MB memory) -> physical PluggableDevice (device: 0, name: METAL, pci bus id: <undefined>)
# Plotting
number_of_points = 50
margin = 4.5
minima = np.array([3., .5])
minima_ = minima.reshape(-1, 1)
x_min = 0. - 2
x_max = 0. + 3.5
y_min = 0. - 3.5
y_max = 0. + 2
x_points = np.linspace(x_min, x_max, number_of_points)
y_points = np.linspace(y_min, y_max, number_of_points)
x_mesh, y_mesh = np.meshgrid(x_points, y_points)
z = np.array([f(xps, yps) for xps, yps in zip(x_mesh, y_mesh)])
def plot_optimizers(ax, iterations, optimizers):
ax.contour(x_mesh, y_mesh, z, levels=np.logspace(-0.5, 5, 25), norm=LogNorm(), cmap=plt.cm.jet, linewidths=fig_scale, zorder=-1)
ax.plot(*minima, 'r*', markersize=20*fig_scale)
for name, path, color in zip(opt_names, all_paths, colors):
if name in optimizers:
p = path[:,:iterations]
ax.plot([], [], color=color, label=name, lw=3*fig_scale, linestyle='-')
ax.quiver(p[0,:-1], p[1,:-1], p[0,1:]-p[0,:-1], p[1,1:]-p[1,:-1], scale_units='xy', angles='xy', scale=1, color=color, lw=4)
ax.set_xlim((x_min, x_max))
ax.set_ylim((y_min, y_max))
ax.legend(loc='lower left', prop={'size': 15*fig_scale})
ax.set_xticks([])
ax.set_yticks([])
plt.tight_layout()
from decimal import *
from matplotlib.colors import LogNorm
# Training for momentum
all_lr_paths = []
lr_range = [0.005 * i for i in range(0,10)]
for lr in lr_range:
opt = tf.optimizers.SGD(lr, nesterov=False)
x_init = 0.8
x = tf.compat.v1.get_variable('x', dtype=tf.float32, initializer=tf.constant(x_init))
y_init = 1.6
y = tf.compat.v1.get_variable('y', dtype=tf.float32, initializer=tf.constant(y_init))
x_history = []
y_history = []
z_prev = 0.0
max_steps = 100
for step in range(max_steps):
with tf.GradientTape() as g:
z = f(x, y)
x_history.append(x.numpy())
y_history.append(y.numpy())
dz_dx, dz_dy = g.gradient(z, [x, y])
opt.apply_gradients(zip([dz_dx, dz_dy], [x, y]))
if np.abs(z_prev - z.numpy()) < 1e-6:
break
z_prev = z.numpy()
x_history = np.array(x_history)
y_history = np.array(y_history)
path = np.concatenate((np.expand_dims(x_history, 1), np.expand_dims(y_history, 1)), axis=1).T
all_lr_paths.append(path)
# Plotting
number_of_points = 50
margin = 4.5
minima = np.array([3., .5])
minima_ = minima.reshape(-1, 1)
x_min = 0. - 2
x_max = 0. + 3.5
y_min = 0. - 3.5
y_max = 0. + 2
x_points = np.linspace(x_min, x_max, number_of_points)
y_points = np.linspace(y_min, y_max, number_of_points)
x_mesh, y_mesh = np.meshgrid(x_points, y_points)
z = np.array([f(xps, yps) for xps, yps in zip(x_mesh, y_mesh)])
def plot_learning_rate_optimizers(ax, iterations, lr):
ax.contour(x_mesh, y_mesh, z, levels=np.logspace(-0.5, 5, 25), norm=LogNorm(), cmap=plt.cm.jet, linewidths=fig_scale, zorder=-1)
ax.plot(*minima, 'r*', markersize=20*fig_scale)
for path, lrate in zip(all_lr_paths, lr_range):
if round(lrate,3) == lr:
p = path[:,:iterations]
ax.plot([], [], color='b', label="Learning rate {}".format(lr), lw=3*fig_scale, linestyle='-')
ax.quiver(p[0,:-1], p[1,:-1], p[0,1:]-p[0,:-1], p[1,1:]-p[1,:-1], scale_units='xy', angles='xy', scale=1, color='b', lw=4)
ax.set_xlim((x_min, x_max))
ax.set_ylim((y_min, y_max))
ax.legend(loc='lower left', prop={'size': 15*fig_scale})
ax.set_xticks([])
ax.set_yticks([])
plt.tight_layout()
Show code cell source
# Toy plot to illustrate nesterov momentum
# TODO: replace with actual gradient computation?
def plot_nesterov(ax, method="Nesterov momentum"):
ax.contour(x_mesh, y_mesh, z, levels=np.logspace(-0.5, 5, 25), norm=LogNorm(), cmap=plt.cm.jet, linewidths=fig_scale, zorder=-1)
ax.plot(*minima, 'r*', markersize=20*fig_scale)
# toy example
ax.quiver(-0.8,-1.13,1,1.33, scale_units='xy', angles='xy', scale=1, color='k', alpha=0.5, lw=3, label="previous update")
# 0.9 * previous update
ax.quiver(0.2,0.2,0.9,1.2, scale_units='xy', angles='xy', scale=1, color='g', lw=3, label="momentum step")
if method == "Momentum":
ax.quiver(0.2,0.2,0.5,0, scale_units='xy', angles='xy', scale=1, color='r', lw=3, label="gradient step")
ax.quiver(0.2,0.2,0.9*0.9+0.5,1.2, scale_units='xy', angles='xy', scale=1, color='b', lw=3, label="actual step")
if method == "Nesterov momentum":
ax.quiver(1.1,1.4,-0.2,-1, scale_units='xy', angles='xy', scale=1, color='r', lw=3, label="'lookahead' gradient step")
ax.quiver(0.2,0.2,0.7,0.2, scale_units='xy', angles='xy', scale=1, color='b', lw=3, label="actual step")
ax.set_title(method)
ax.set_xlim((x_min, x_max))
ax.set_ylim((-2.5, y_max))
ax.legend(loc='lower right', prop={'size': 9*fig_scale})
ax.set_xticks([])
ax.set_yticks([])
plt.tight_layout()
Optimizers#
SGD with learning rate schedules#
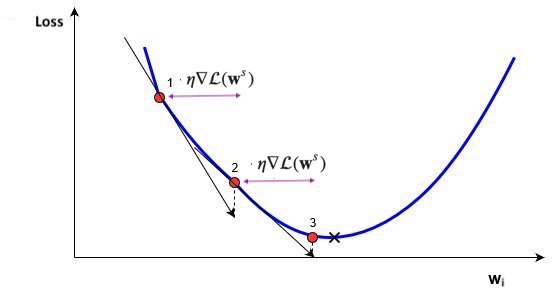
Using a constant learning \(\eta\) rate for weight updates \(\mathbf{w}_{(s+1)} = \mathbf{w}_s-\eta\nabla \mathcal{L}(\mathbf{w}_s)\) is not ideal
You would need to ‘magically’ know the right value
import ipywidgets as widgets
from ipywidgets import interact, interact_manual
@interact
def plot_lr(iterations=(1,100,1), learning_rate=(0.005,0.04,0.005)):
fig, ax = plt.subplots(figsize=(6*fig_scale,4*fig_scale))
plot_learning_rate_optimizers(ax,iterations,round(learning_rate,3))
if not interactive:
plot_lr(iterations=50, learning_rate=0.02)
SGD with learning rate schedules#
Learning rate decay/annealing with decay rate \(k\)
E.g. exponential (\(\eta_{s+1} = \eta_{0} e^{-ks}\)), inverse-time (\(\eta_{s+1} = \frac{\eta_{0}}{1+ks}\)),…
Cyclical learning rates
Change from small to large: hopefully in ‘good’ region long enough before diverging
Warm restarts: aggressive decay + reset to initial learning rate
Show code cell source
@interact
def compare_optimizers(iterations=(1,100,1), optimizer1=opt_names, optimizer2=opt_names):
fig, ax = plt.subplots(figsize=(6*fig_scale,4*fig_scale))
plot_optimizers(ax,iterations,[optimizer1,optimizer2])
Show code cell source
if not interactive:
fig, axes = plt.subplots(1,2, figsize=(10*fig_scale,4*fig_scale))
optimizers = ['sgd_decay', 'sgd_cyclic']
for function, ax in zip(optimizers,axes):
plot_optimizers(ax,100,function)
plt.tight_layout();
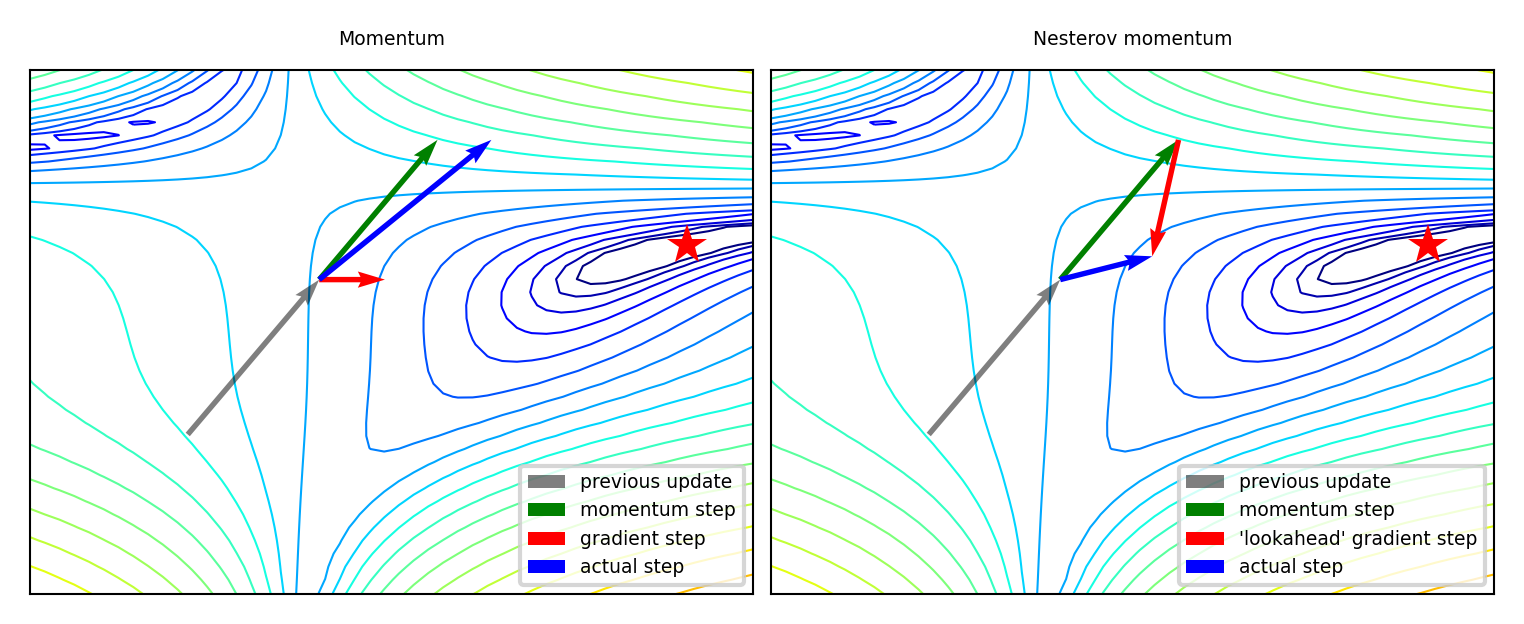
Momentum#
Imagine a ball rolling downhill: accumulates momentum, doesn’t exactly follow steepest descent
Reduces oscillation, follows larger (consistent) gradient of the loss surface
Adds a velocity vector \(\mathbf{v}\) with momentum \(\gamma\) (e.g. 0.9, or increase from \(\gamma=0.5\) to \(\gamma=0.99\)) $\(\mathbf{w}_{(s+1)} = \mathbf{w}_{(s)} + \mathbf{v}_{(s)} \qquad \text{with} \qquad \color{blue}{\mathbf{v}_{(s)}} = \color{green}{\gamma \mathbf{v}_{(s-1)}} - \color{red}{\eta \nabla \mathcal{L}(\mathbf{w}_{(s)})}\)$
Nesterov momentum: Look where momentum step would bring you, compute gradient there
Responds faster (and reduces momentum) when the gradient changes $\(\color{blue}{\mathbf{v}_{(s)}} = \color{green}{\gamma \mathbf{v}_{(s-1)}} - \color{red}{\eta \nabla \mathcal{L}(\mathbf{w}_{(s)} + \gamma \mathbf{v}_{(s-1)})}\)$
Show code cell source
fig, axes = plt.subplots(1,2, figsize=(10*fig_scale,4*fig_scale))
plot_nesterov(axes[0],method="Momentum")
plot_nesterov(axes[1],method="Nesterov momentum")
Momentum in practice#
Show code cell source
@interact
def compare_optimizers(iterations=(1,100,1), optimizer1=opt_names, optimizer2=opt_names):
fig, ax = plt.subplots(figsize=(6*fig_scale,4*fig_scale))
plot_optimizers(ax,iterations,[optimizer1,optimizer2])
Show code cell source
if not interactive:
fig, axes = plt.subplots(1,2, figsize=(10*fig_scale,3.5*fig_scale))
optimizers = [['sgd','momentum'], ['momentum','nesterov']]
for function, ax in zip(optimizers,axes):
plot_optimizers(ax,100,function)
plt.tight_layout();
Adaptive gradients#
‘Correct’ the learning rate for each \(w_i\) based on specific local conditions (layer depth, fan-in,…)
Adagrad: scale \(\eta\) according to squared sum of previous gradients \(G_{i,(s)} = \sum_{t=1}^s \nabla \mathcal{L}(w_{i,(t)})^2\)
Update rule for \(w_i\). Usually \(\epsilon=10^{-7}\) (avoids division by 0), \(\eta=0.001\). $\(w_{i,(s+1)} = w_{i,(s)} - \frac{\eta}{\sqrt{G_{i,(s)}+\epsilon}} \nabla \mathcal{L}(w_{i,(s)})\)$
RMSProp: use moving average of squared gradients \(m_{i,(s)} = \gamma m_{i,(s-1)} + (1-\gamma) \nabla \mathcal{L}(w_{i,(s)})^2\)
Avoids that gradients dwindle to 0 as \(G_{i,(s)}\) grows. Usually \(\gamma=0.9, \eta=0.001\) $\(w_{i,(s+1)} = w_{i,(s)}- \frac{\eta}{\sqrt{m_{i,(s)}+\epsilon}} \nabla \mathcal{L}(w_{i,(s)})\)$
Show code cell source
if not interactive:
fig, axes = plt.subplots(1,2, figsize=(10*fig_scale,2.6*fig_scale))
optimizers = [['sgd','adagrad', 'rmsprop'], ['rmsprop','rmsprop_mom']]
for function, ax in zip(optimizers,axes):
plot_optimizers(ax,100,function)
plt.tight_layout();
Show code cell source
@interact
def compare_optimizers(iterations=(1,100,1), optimizer1=opt_names, optimizer2=opt_names):
fig, ax = plt.subplots(figsize=(6*fig_scale,4*fig_scale))
plot_optimizers(ax,iterations,[optimizer1,optimizer2])
Adam (Adaptive moment estimation)#
Adam: RMSProp + momentum. Adds moving average for gradients as well (\(\gamma_2\) = momentum):
Adds a bias correction to avoid small initial gradients: \(\hat{m}_{i,(s)} = \frac{m_{i,(s)}}{1-\gamma}\) and \(\hat{g}_{i,(s)} = \frac{g_{i,(s)}}{1-\gamma_2}\) $\(g_{i,(s)} = \gamma_2 g_{i,(s-1)} + (1-\gamma_2) \nabla \mathcal{L}(w_{i,(s)})\)\( \)\(w_{i,(s+1)} = w_{i,(s)}- \frac{\eta}{\sqrt{\hat{m}_{i,(s)}+\epsilon}} \hat{g}_{i,(s)}\)$
Adamax: Idem, but use max() instead of moving average: \(u_{i,(s)} = max(\gamma u_{i,(s-1)}, |\mathcal{L}(w_{i,(s)})|)\) $\(w_{i,(s+1)} = w_{i,(s)}- \frac{\eta}{u_{i,(s)}} \hat{g}_{i,(s)}\)$
Show code cell source
if not interactive:
# fig, axes = plt.subplots(1,2, figsize=(10*fig_scale,2.6*fig_scale))
# optimizers = [['sgd','adam'], ['adam','adamax']]
# for function, ax in zip(optimizers,axes):
# plot_optimizers(ax,100,function)
# plt.tight_layout();
fig, axes = plt.subplots(1,1, figsize=(5*fig_scale,2.6*fig_scale))
optimizers = [['sgd','adam']]
plot_optimizers(axes,100,['sgd','adam'])
plt.tight_layout();
Show code cell source
@interact
def compare_optimizers(iterations=(1,100,1), optimizer1=opt_names, optimizer2=opt_names):
fig, ax = plt.subplots(figsize=(6*fig_scale,4*fig_scale))
plot_optimizers(ax,iterations,[optimizer1,optimizer2])
SGD Optimizer Zoo#
RMSProp often works well, but do try alternatives. For even more optimizers, see here.
Show code cell source
if not interactive:
fig, ax = plt.subplots(1,1, figsize=(10*fig_scale,5.5*fig_scale))
plot_optimizers(ax,100,opt_names)
Show code cell source
@interact
def compare_optimizers(iterations=(1,100,1)):
fig, ax = plt.subplots(figsize=(10*fig_scale,6*fig_scale))
plot_optimizers(ax,iterations,opt_names)
Show code cell source
from tensorflow.keras import models
from tensorflow.keras import layers
from numpy.random import seed
from tensorflow.random import set_seed
import random
import os
#Trying to set all seeds
os.environ['PYTHONHASHSEED']=str(0)
random.seed(0)
seed(0)
set_seed(0)
seed_value= 0
Neural networks in practice#
There are many practical courses on training neural nets. E.g.:
With TensorFlow: https://www.tensorflow.org/resources/learn-ml
With PyTorch: fast.ai course, https://pytorch.org/tutorials/
Here, we’ll use Keras, a general API for building neural networks
Default API for TensorFlow, also has backends for CNTK, Theano
Focus on key design decisions, evaluation, and regularization
Running example: Fashion-MNIST
28x28 pixel images of 10 classes of fashion items
Show code cell source
# Download FMINST data. Takes a while the first time.
mnist = oml.datasets.get_dataset(40996)
X, y, _, _ = mnist.get_data(target=mnist.default_target_attribute, dataset_format='array');
X = X.reshape(70000, 28, 28)
fmnist_classes = {0:"T-shirt/top", 1: "Trouser", 2: "Pullover", 3: "Dress", 4: "Coat", 5: "Sandal",
6: "Shirt", 7: "Sneaker", 8: "Bag", 9: "Ankle boot"}
# Take some random examples
from random import randint
fig, axes = plt.subplots(1, 5, figsize=(10, 5))
for i in range(5):
n = randint(0,70000)
axes[i].imshow(X[n], cmap=plt.cm.gray_r)
axes[i].set_xticks([])
axes[i].set_yticks([])
axes[i].set_xlabel("{}".format(fmnist_classes[y[n]]))
plt.show();
Building the network#
We first build a simple sequential model (no branches)
Input layer (‘input_shape’): a flat vector of 28*28=784 nodes
We’ll see how to properly deal with images later
Two dense hidden layers: 512 nodes each, ReLU activation
Glorot weight initialization is applied by default
Output layer: 10 nodes (for 10 classes) and softmax activation
network = models.Sequential()
network.add(layers.Dense(512, activation='relu', kernel_initializer='he_normal', input_shape=(28 * 28,)))
network.add(layers.Dense(512, activation='relu', kernel_initializer='he_normal'))
network.add(layers.Dense(10, activation='softmax'))
Show code cell source
from tensorflow.keras import initializers
network = models.Sequential()
network.add(layers.Dense(512, activation='relu', kernel_initializer='he_normal', input_shape=(28 * 28,)))
network.add(layers.Dense(512, activation='relu', kernel_initializer='he_normal'))
network.add(layers.Dense(10, activation='softmax'))
Model summary#
Lots of parameters (weights and biases) to learn!
hidden layer 1 : (28 * 28 + 1) * 512 = 401920
hidden layer 2 : (512 + 1) * 512 = 262656
output layer: (512 + 1) * 10 = 5130
network.summary()
Show code cell source
network.summary()
Model: "sequential"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
dense (Dense) (None, 512) 401920
dense_1 (Dense) (None, 512) 262656
dense_2 (Dense) (None, 10) 5130
=================================================================
Total params: 669,706
Trainable params: 669,706
Non-trainable params: 0
_________________________________________________________________
Choosing loss, optimizer, metrics#
Loss function
Cross-entropy (log loss) for multi-class classification (\(y_{true}\) is one-hot encoded)
Use binary crossentropy for binary problems (single output node)
Use sparse categorical crossentropy if \(y_{true}\) is label-encoded (1,2,3,…)
Optimizer
Any of the optimizers we discussed before. RMSprop usually works well.
Metrics
To monitor performance during training and testing, e.g. accuracy
# Shorthand
network.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy'])
# Detailed
network.compile(loss=CategoricalCrossentropy(label_smoothing=0.01),
optimizer=RMSprop(learning_rate=0.001, momentum=0.0)
metrics=[Accuracy()])
Show code cell source
from tensorflow.keras.optimizers import RMSprop
from tensorflow.keras.losses import CategoricalCrossentropy
from tensorflow.keras.metrics import Accuracy
network.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy'])
Preprocessing: Normalization, Reshaping, Encoding#
Always normalize (standardize or min-max) the inputs. Mean should be close to 0.
Avoid that some inputs overpower others
Speed up convergence
Gradients of activation functions \(\frac{\partial a_{h}}{\partial z_{h}}\) are (near) 0 for large inputs
If some gradients become much larger than others, SGD will start zig-zagging
Reshape the data to fit the shape of the input layer, e.g. (n, 28*28) or (n, 28,28)
Tensor with instances in first dimension, rest must match the input layer
In multi-class classification, every class is an output node, so one-hot-encode the labels
e.g. class ‘4’ becomes [0,0,0,0,1,0,0,0,0,0]
X = X.astype('float32') / 255
X = X.reshape((60000, 28 * 28))
y = to_categorical(y)
Show code cell source
from sklearn.model_selection import train_test_split
Xf_train, Xf_test, yf_train, yf_test = train_test_split(X, y, train_size=60000, shuffle=True, random_state=0)
Xf_train = Xf_train.reshape((60000, 28 * 28))
Xf_test = Xf_test.reshape((10000, 28 * 28))
# TODO: check if standardization works better
Xf_train = Xf_train.astype('float32') / 255
Xf_test = Xf_test.astype('float32') / 255
from tensorflow.keras.utils import to_categorical
yf_train = to_categorical(yf_train)
yf_test = to_categorical(yf_test)
Choosing training hyperparameters#
Number of epochs: enough to allow convergence
Too much: model starts overfitting (or just wastes time)
Batch size: small batches (e.g. 32, 64,… samples) often preferred
‘Noisy’ training data makes overfitting less likely
Larger batches generalize less well (‘generalization gap’)
Requires less memory (especially in GPUs)
Large batches do speed up training, may converge in fewer epochs
Batch size interacts with learning rate
Instead of shrinking the learning rate you can increase batch size
history = network.fit(X_train, y_train, epochs=3, batch_size=32);
Show code cell source
history = network.fit(Xf_train, yf_train, epochs=3, batch_size=32, verbose=0);
2023-09-22 09:09:27.549837: W tensorflow/core/platform/profile_utils/cpu_utils.cc:128] Failed to get CPU frequency: 0 Hz
2023-09-22 09:09:27.889092: I tensorflow/core/grappler/optimizers/custom_graph_optimizer_registry.cc:114] Plugin optimizer for device_type GPU is enabled.
Predictions and evaluations#
We can now call predict to generate predictions, and evaluate the trained model on the entire test set
network.predict(X_test)
test_loss, test_acc = network.evaluate(X_test, y_test)
Show code cell source
np.set_printoptions(precision=7)
fig, axes = plt.subplots(1, 1, figsize=(2, 2))
sample_id = 4
axes.imshow(Xf_test[sample_id].reshape(28, 28), cmap=plt.cm.gray_r)
axes.set_xlabel("True label: {}".format(yf_test[sample_id]))
axes.set_xticks([])
axes.set_yticks([])
print(network.predict(Xf_test, verbose=0)[sample_id])
2023-09-22 09:18:52.963181: I tensorflow/core/grappler/optimizers/custom_graph_optimizer_registry.cc:114] Plugin optimizer for device_type GPU is enabled.
[0.0090286 0.0000066 0.8731063 0.0004194 0.0108315 0.0000054 0.1064771
0.0000001 0.0001248 0.0000002]
Show code cell source
test_loss, test_acc = network.evaluate(Xf_test, yf_test, verbose=0)
print('Test accuracy:', test_acc)
Test accuracy: 0.8842999935150146
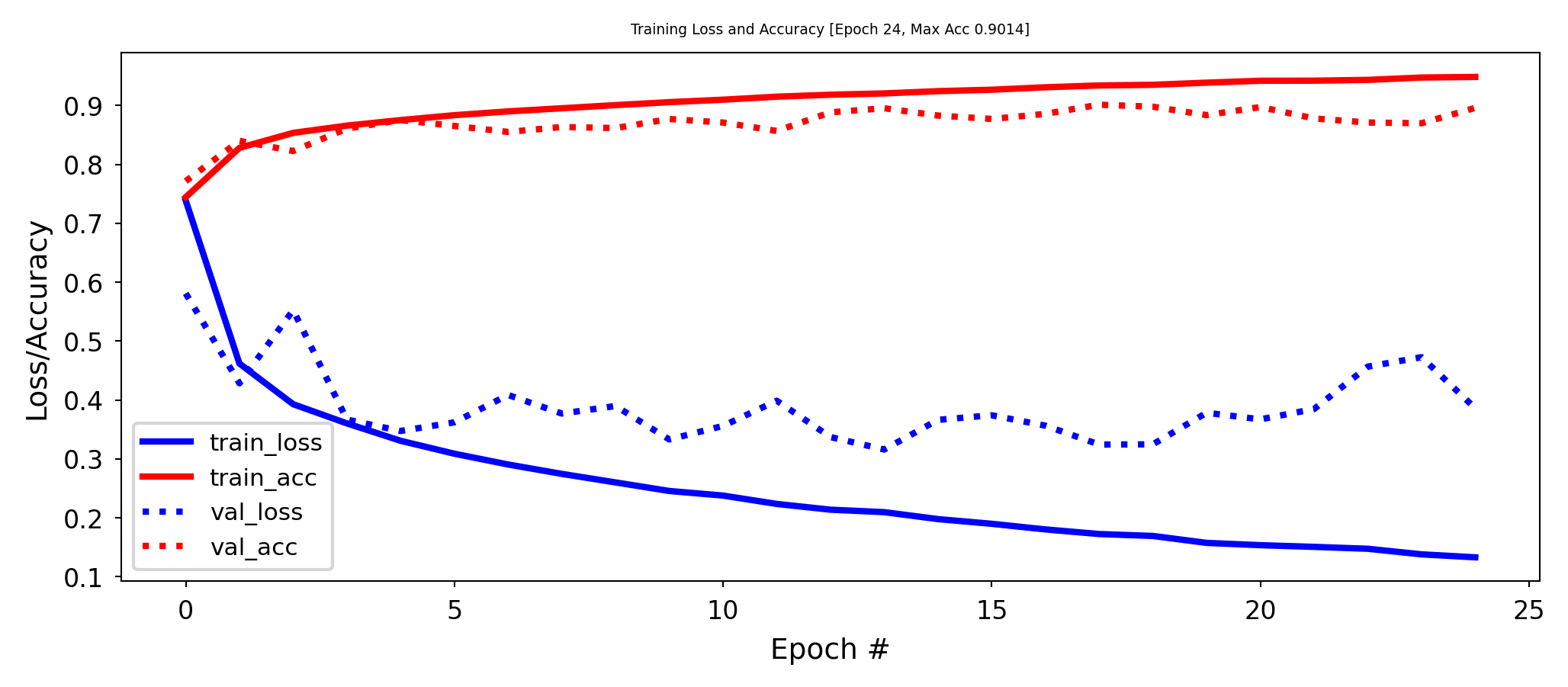
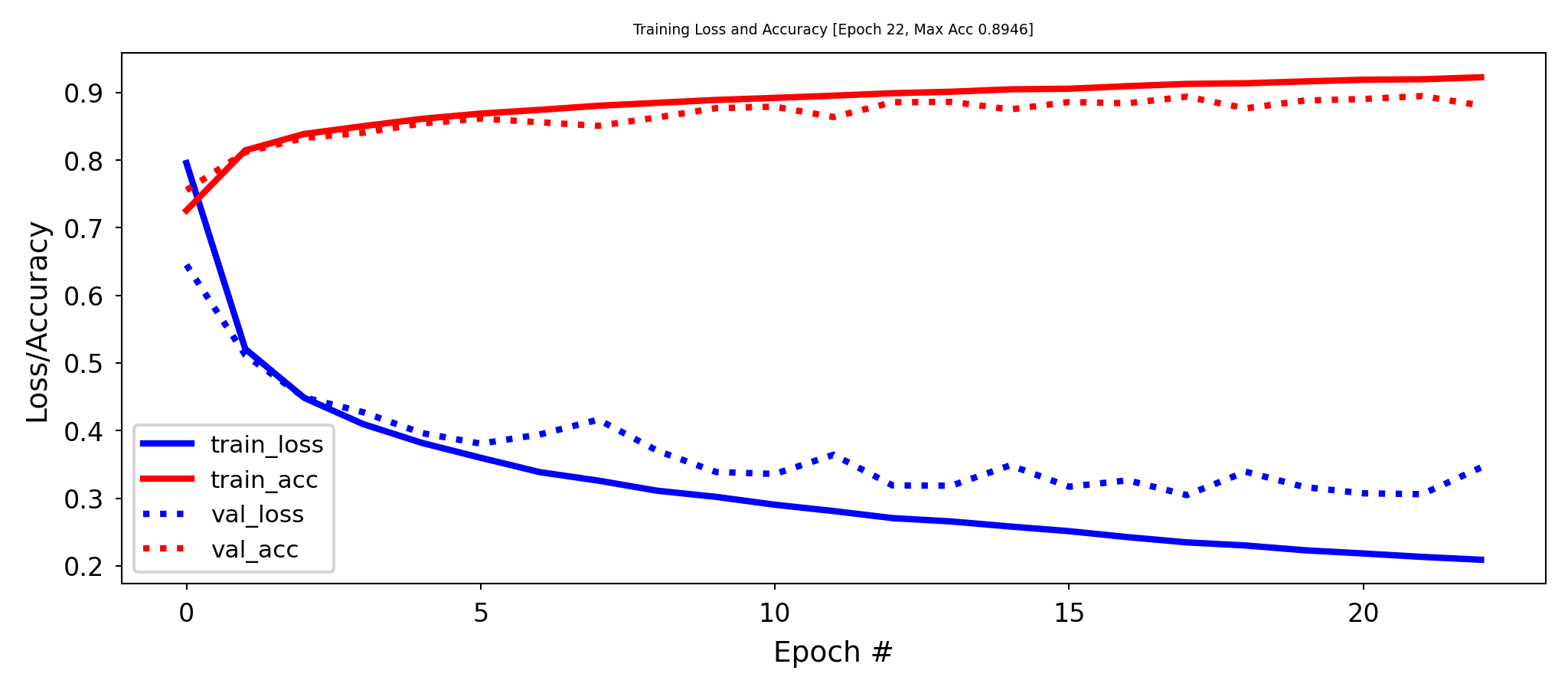
Model selection#
How many epochs do we need for training?
Train the neural net and track the loss after every iteration on a validation set
You can add a callback to the fit version to get info on every epoch
Best model after a few epochs, then starts overfitting
Show code cell source
from tensorflow.keras.callbacks import Callback
from IPython.display import clear_output
# For plotting the learning curve in real time
class TrainingPlot(Callback):
# This function is called when the training begins
def on_train_begin(self, logs={}):
# Initialize the lists for holding the logs, losses and accuracies
self.losses = []
self.acc = []
self.val_losses = []
self.val_acc = []
self.logs = []
self.max_acc = 0
# This function is called at the end of each epoch
def on_epoch_end(self, epoch, logs={}):
# Append the logs, losses and accuracies to the lists
self.logs.append(logs)
self.losses.append(logs.get('loss'))
self.acc.append(logs.get('accuracy'))
self.val_losses.append(logs.get('val_loss'))
self.val_acc.append(logs.get('val_accuracy'))
self.max_acc = max(self.max_acc, logs.get('val_accuracy'))
# Before plotting ensure at least 2 epochs have passed
if len(self.losses) > 1:
# Clear the previous plot
clear_output(wait=True)
N = np.arange(0, len(self.losses))
# Plot train loss, train acc, val loss and val acc against epochs passed
plt.figure(figsize=(8,3))
plt.plot(N, self.losses, lw=2, c="b", linestyle="-", label = "train_loss")
plt.plot(N, self.acc, lw=2, c="r", linestyle="-", label = "train_acc")
plt.plot(N, self.val_losses, lw=2, c="b", linestyle=":", label = "val_loss")
plt.plot(N, self.val_acc, lw=2, c="r", linestyle=":", label = "val_acc")
plt.title("Training Loss and Accuracy [Epoch {}, Max Acc {:.4f}]".format(epoch, self.max_acc))
plt.xlabel("Epoch #", fontsize=18*fig_scale)
plt.ylabel("Loss/Accuracy", fontsize=18*fig_scale)
plt.legend(prop={'size': 15*fig_scale})
plt.tick_params(axis='both', labelsize=16*fig_scale)
plt.show()
Show code cell source
from sklearn.model_selection import train_test_split
x_val, partial_x_train = Xf_train[:10000], Xf_train[10000:]
y_val, partial_y_train = yf_train[:10000], yf_train[10000:]
network = models.Sequential()
network.add(layers.Dense(512, activation='relu', kernel_initializer='he_normal', input_shape=(28 * 28,)))
network.add(layers.Dense(512, activation='relu', kernel_initializer='he_normal'))
network.add(layers.Dense(10, activation='softmax'))
network.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy'])
plot_losses = TrainingPlot()
history = network.fit(partial_x_train, partial_y_train, epochs=25, batch_size=512, verbose=0,
validation_data=(x_val, y_val), callbacks=[plot_losses])
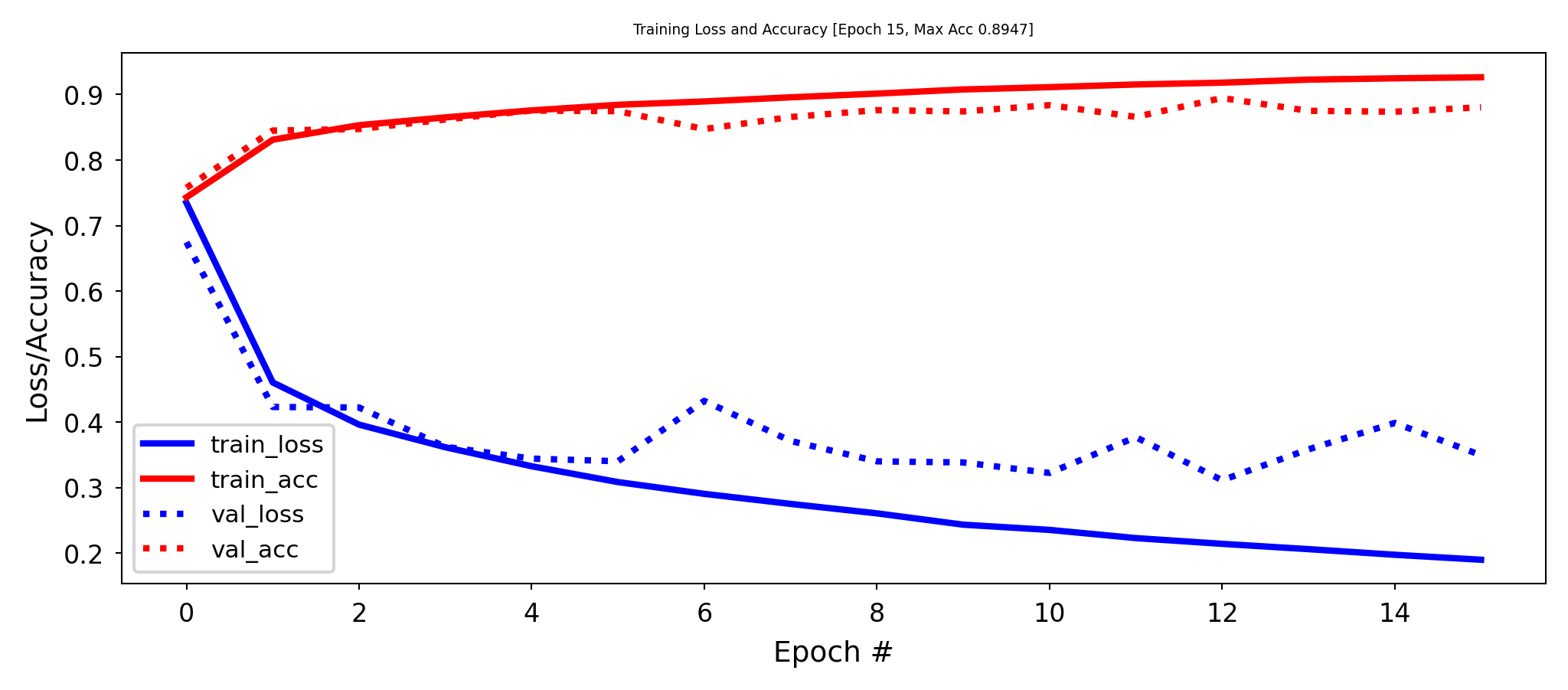
Early stopping#
Stop training when the validation loss (or validation accuracy) no longer improves
Loss can be bumpy: use a moving average or wait for \(k\) steps without improvement
earlystop = callbacks.EarlyStopping(monitor='val_loss', patience=3)
model.fit(x_train, y_train, epochs=25, batch_size=512, callbacks=[earlystop])
Show code cell source
from tensorflow.keras import callbacks
earlystop = callbacks.EarlyStopping(monitor='val_loss', patience=3)
network = models.Sequential()
network.add(layers.Dense(512, activation='relu', kernel_initializer='he_normal', input_shape=(28 * 28,)))
network.add(layers.Dense(512, activation='relu', kernel_initializer='he_normal'))
network.add(layers.Dense(10, activation='softmax'))
network.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy'])
plot_losses = TrainingPlot()
history = network.fit(partial_x_train, partial_y_train, epochs=25, batch_size=512, verbose=0,
validation_data=(x_val, y_val), callbacks=[plot_losses, earlystop])
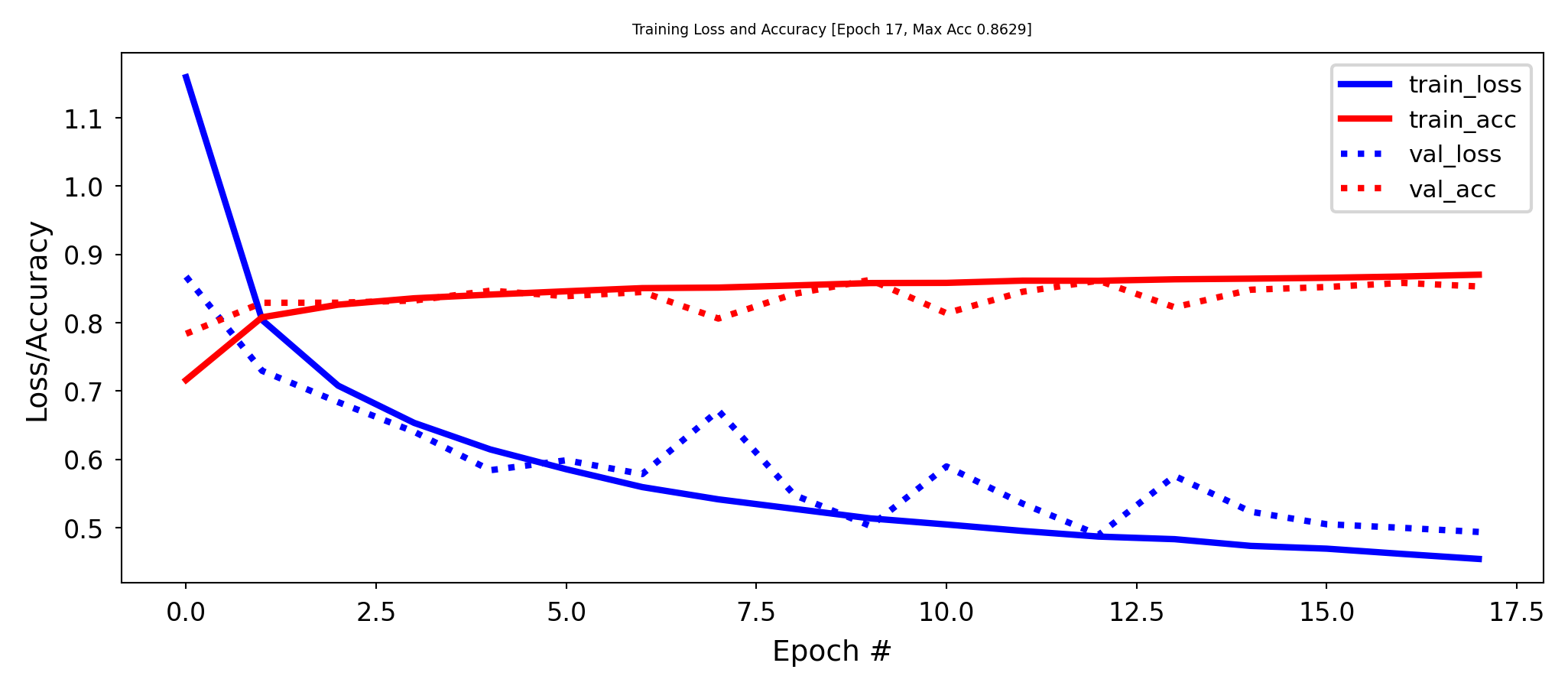
Regularization and memorization capacity#
The number of learnable parameters is called the model capacity
A model with more parameters has a higher memorization capacity
Too high capacity causes overfitting, too low causes underfitting
In the extreme, the training set can be ‘memorized’ in the weights
Smaller models are forced it to learn a compressed representation that generalizes better
Find the sweet spot: e.g. start with few parameters, increase until overfitting stars.
Example: 256 nodes in first layer, 32 nodes in second layer, similar performance
Show code cell source
network = models.Sequential()
network.add(layers.Dense(256, activation='relu', kernel_initializer='he_normal', input_shape=(28 * 28,)))
network.add(layers.Dense(32, activation='relu', kernel_initializer='he_normal'))
network.add(layers.Dense(10, activation='softmax'))
network.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy'])
earlystop5 = callbacks.EarlyStopping(monitor='val_loss', patience=5)
plot_losses = TrainingPlot()
history = network.fit(partial_x_train, partial_y_train, epochs=30, batch_size=512, verbose=0,
validation_data=(x_val, y_val), callbacks=[plot_losses, earlystop5])
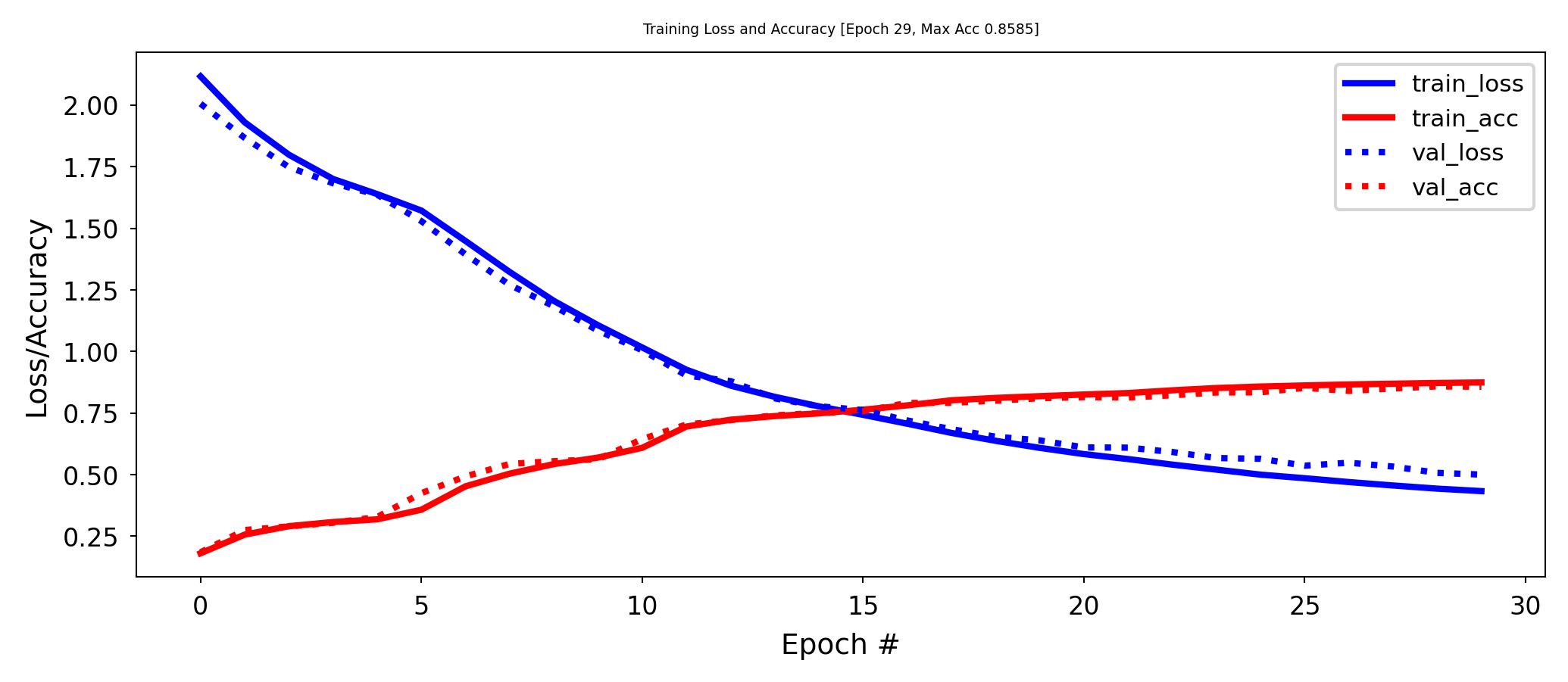
Information bottleneck#
If a layer is too narrow, it will lose information that can never be recovered by subsequent layers
Information bottleneck theory defines a bound on the capacity of the network
Imagine that you need to learn 10 outputs (e.g. classes) and your hidden layer has 2 nodes
This is like trying to learn 10 hyperplanes from a 2-dimensional representation
Example: bottleneck of 2 nodes, no overfitting, much higher training loss
Show code cell source
network = models.Sequential()
network.add(layers.Dense(256, activation='relu', kernel_initializer='he_normal', input_shape=(28 * 28,)))
network.add(layers.Dense(2, activation='relu', kernel_initializer='he_normal'))
network.add(layers.Dense(10, activation='softmax'))
network.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy'])
earlystop5 = callbacks.EarlyStopping(monitor='val_loss', patience=5)
plot_losses = TrainingPlot()
history = network.fit(partial_x_train, partial_y_train, epochs=30, batch_size=512, verbose=0,
validation_data=(x_val, y_val), callbacks=[plot_losses, earlystop5])
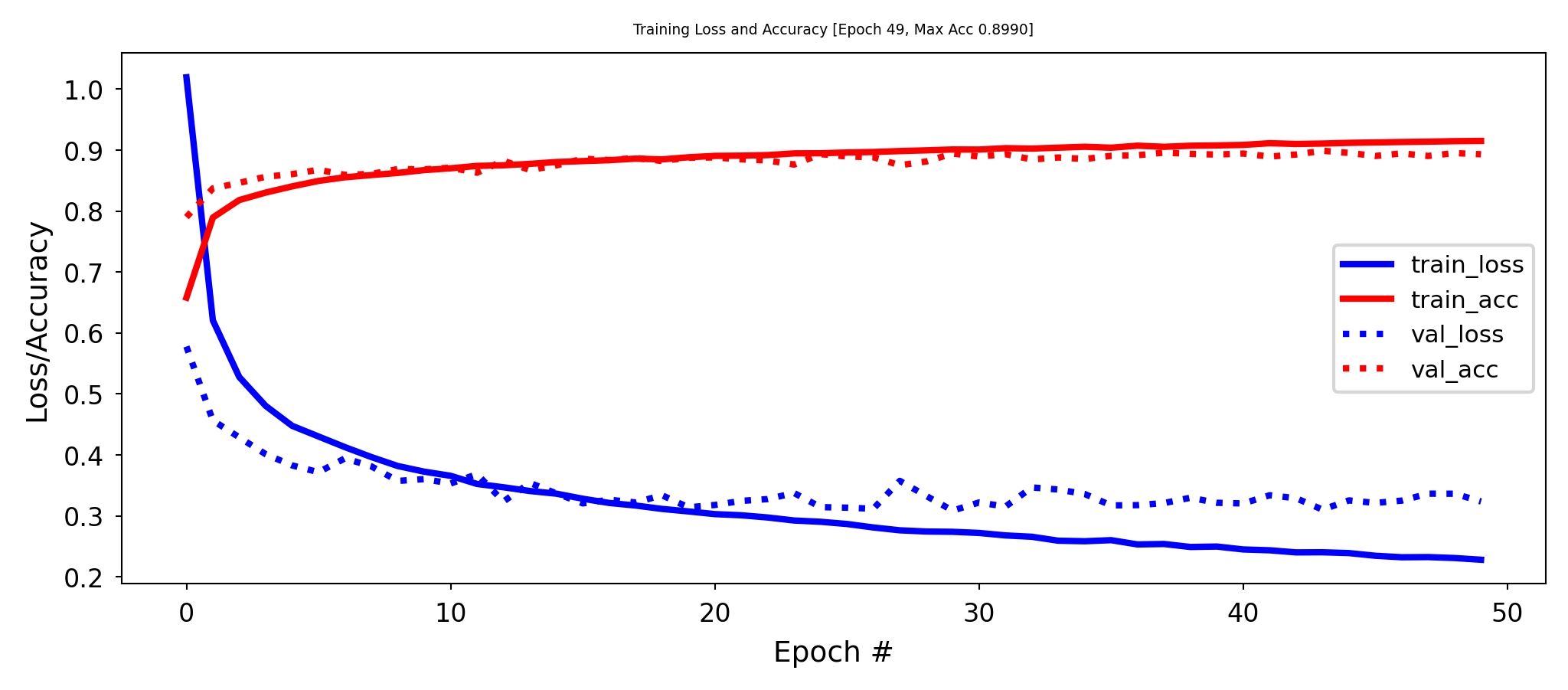
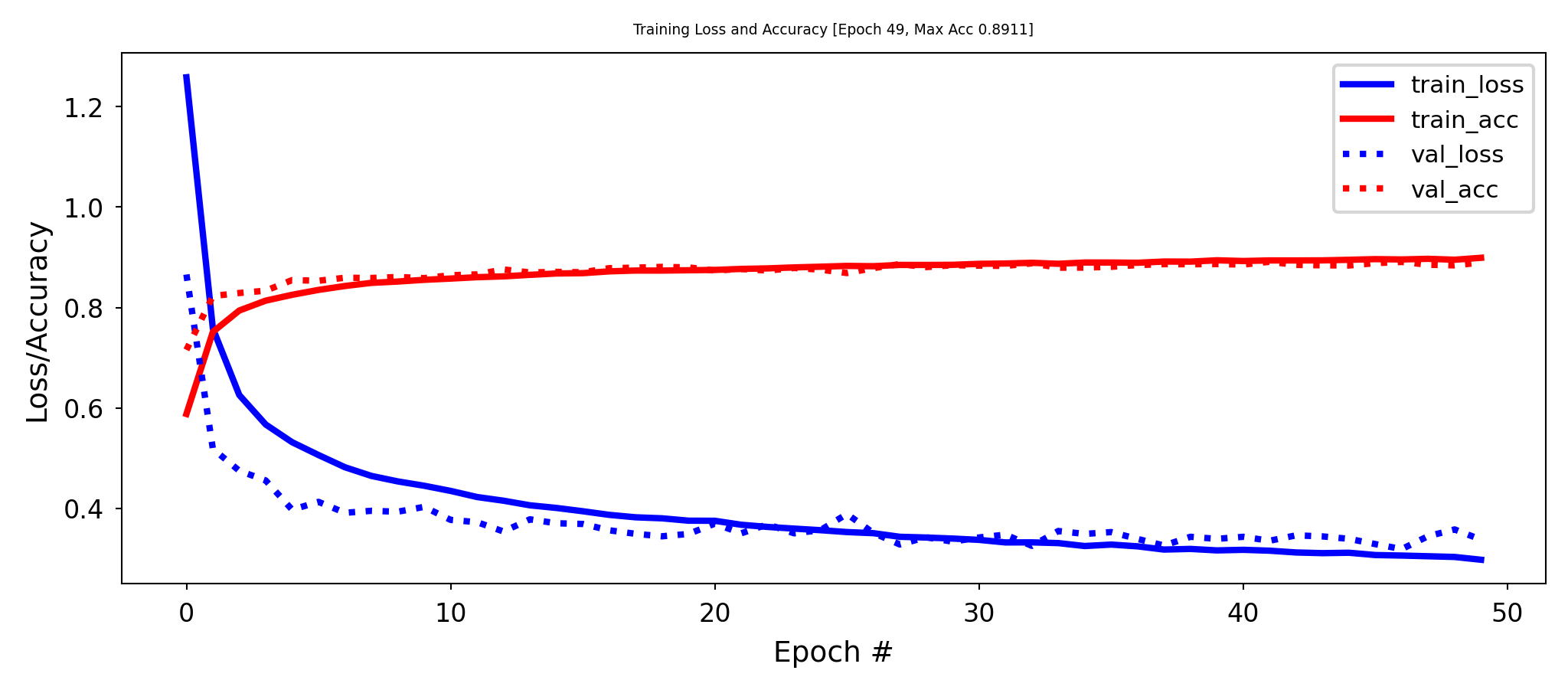
Weight regularization (weight decay)#
As we did many times before, we can also add weight regularization to our loss function
L1 regularization: leads to sparse networks with many weights that are 0
L2 regularization: leads to many very small weights
network = models.Sequential()
network.add(layers.Dense(256, activation='relu', kernel_regularizer=regularizers.l2(0.001), input_shape=(28 * 28,)))
network.add(layers.Dense(128, activation='relu', kernel_regularizer=regularizers.l2(0.001)))
Show code cell source
from tensorflow.keras import regularizers
network = models.Sequential()
network.add(layers.Dense(256, activation='relu', kernel_regularizer=regularizers.l2(0.001), input_shape=(28 * 28,)))
network.add(layers.Dense(32, activation='relu', kernel_regularizer=regularizers.l2(0.001)))
network.add(layers.Dense(10, activation='softmax'))
network.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy'])
earlystop5 = callbacks.EarlyStopping(monitor='val_loss', patience=5)
plot_losses = TrainingPlot()
history = network.fit(partial_x_train, partial_y_train, epochs=50, batch_size=512, verbose=0,
validation_data=(x_val, y_val), callbacks=[plot_losses, earlystop5])
Dropout#
Every iteration, randomly set a number of activations \(a_i\) to 0
Dropout rate : fraction of the outputs that are zeroed-out (e.g. 0.1 - 0.5)
Idea: break up accidental non-significant learned patterns
At test time, nothing is dropped out, but the output values are scaled down by the dropout rate
Balances out that more units are active than during training
Show code cell source
fig = plt.figure(figsize=(4*fig_scale, 4*fig_scale))
ax = fig.gca()
draw_neural_net(ax, [2, 3, 1], draw_bias=True, labels=True,
show_activations=True, activation=True)
Dropout layers#
Dropout is usually implemented as a special layer
network = models.Sequential()
network.add(layers.Dense(256, activation='relu', input_shape=(28 * 28,)))
network.add(layers.Dropout(0.5))
network.add(layers.Dense(32, activation='relu'))
network.add(layers.Dropout(0.5))
network.add(layers.Dense(10, activation='softmax'))
Show code cell source
network = models.Sequential()
network.add(layers.Dense(256, activation='relu', input_shape=(28 * 28,)))
network.add(layers.Dropout(0.3))
network.add(layers.Dense(32, activation='relu'))
network.add(layers.Dropout(0.3))
network.add(layers.Dense(10, activation='softmax'))
network.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy'])
plot_losses = TrainingPlot()
history = network.fit(partial_x_train, partial_y_train, epochs=50, batch_size=512, verbose=0,
validation_data=(x_val, y_val), callbacks=[plot_losses])
Batch Normalization#
We’ve seen that scaling the input is important, but what if layer activations become very large?
Same problems, starting deeper in the network
Batch normalization: normalize the activations of the previous layer within each batch
Within a batch, set the mean activation close to 0 and the standard deviation close to 1
Across badges, use exponential moving average of batch-wise mean and variance
Allows deeper networks less prone to vanishing or exploding gradients
network = models.Sequential()
network.add(layers.Dense(512, activation='relu', input_shape=(28 * 28,)))
network.add(layers.BatchNormalization())
network.add(layers.Dropout(0.5))
network.add(layers.Dense(256, activation='relu'))
network.add(layers.BatchNormalization())
network.add(layers.Dropout(0.5))
network.add(layers.Dense(64, activation='relu'))
network.add(layers.BatchNormalization())
network.add(layers.Dropout(0.5))
network.add(layers.Dense(32, activation='relu'))
network.add(layers.BatchNormalization())
network.add(layers.Dropout(0.5))
Show code cell source
network = models.Sequential()
network.add(layers.Dense(265, activation='relu', input_shape=(28 * 28,)))
network.add(layers.BatchNormalization())
network.add(layers.Dropout(0.5))
network.add(layers.Dense(64, activation='relu'))
network.add(layers.BatchNormalization())
network.add(layers.Dropout(0.5))
network.add(layers.Dense(32, activation='relu'))
network.add(layers.BatchNormalization())
network.add(layers.Dropout(0.5))
network.add(layers.Dense(10, activation='softmax'))
network.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy'])
plot_losses = TrainingPlot()
history = network.fit(partial_x_train, partial_y_train, epochs=50, batch_size=512, verbose=0,
validation_data=(x_val, y_val), callbacks=[plot_losses])
Tuning multiple hyperparameters#
You can wrap Keras models as scikit-learn models and use any tuning technique
Keras also has built-in RandomSearch (and HyperBand and BayesianOptimization - see later)
def make_model(hp):
m.add(Dense(units=hp.Int('units', min_value=32, max_value=512, step=32)))
m.compile(optimizer=Adam(hp.Choice('learning rate', [1e-2, 1e-3, 1e-4])))
return model
from tensorflow.keras.wrappers.scikit_learn import KerasClassifier
clf = KerasClassifier(make_model)
grid = GridSearchCV(clf, param_grid=param_grid, cv=3)
from kerastuner.tuners import RandomSearch
tuner = keras.RandomSearch(build_model, max_trials=5)
Summary#
Neural architectures
Training neural nets
Forward pass: Tensor operations
Backward pass: Backpropagation
Neural network design:
Activation functions
Weight initialization
Optimizers
Neural networks in practice
Model selection
Early stopping
Memorization capacity and information bottleneck
L1/L2 regularization
Dropout
Batch normalization