Lecture 7: Convolutional Neural Networks¶
Handling image data
Joaquin Vanschoren, Eindhoven University of Technology
Overview¶
- Image convolution
- Convolutional neural networks
- Data augmentation
- Real-world CNNs
- Model interpretation
- Using pre-trained networks (transfer learning)
Convolutions¶
- Operation that transforms an image by sliding a smaller image (called a filter or kernel ) over the image and multiplying the pixel values
- Slide an $n$ x $n$ filter over $n$ x $n$ patches of the original image
- Every pixel is replaced by the sum of the element-wise products of the values of the image patch around that pixel and the kernel
# kernel and image_patch are n x n matrices
pixel_out = np.sum(kernel * image_patch)
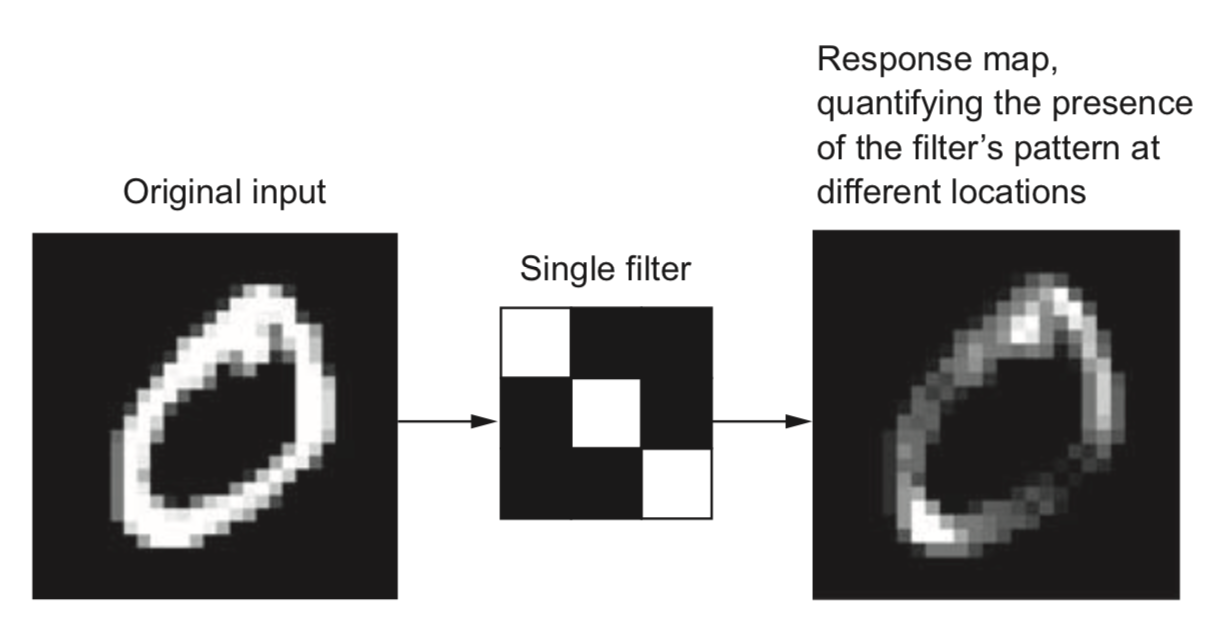
- Different kernels can detect different types of patterns in the image

Demonstration on Fashion-MNIST¶

Demonstration of convolution with edge filters

Image convolution in practice¶
- How do we know which filters are best for a given image?
- Families of kernels (or filter banks ) can be run on every image
- Gabor, Sobel, Haar Wavelets,...
- Gabor filters: Wave patterns generated by changing:
- Frequency: narrow or wide ondulations
- Theta: angle (direction) of the wave
- Sigma: resolution (size of the filter)
Demonstration of Gabor filters

Demonstration on the Fashion-MNIST data

Filter banks¶
- Different filters detect different edges, shapes,...
- Not all seem useful

Convolutional neural nets¶
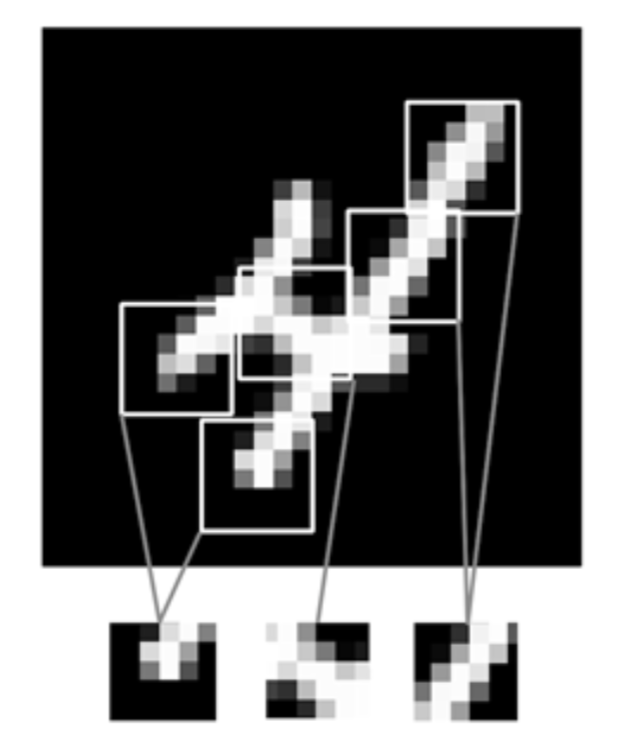
- Finding relationships between individual pixels and the correct class is hard
- Simplify the problem by decomposing it into smaller problems
- First, discover 'local' patterns (edges, lines, endpoints)
- Representing such local patterns as features makes it easier to learn from them
- Deeper layers will do that for us
- We could use convolutions, but how to choose the filters?
Convolutional Neural Networks (ConvNets)¶
- Instead of manually designing the filters, we can also learn them based on data
- Choose filter sizes (manually), initialize with small random weights
- Forward pass: Convolutional layer slides the filter over the input, generates the output
- Backward pass: Update the filter weights according to the loss gradients
- Illustration for 1 filter:
Convolutional layers: Feature maps¶
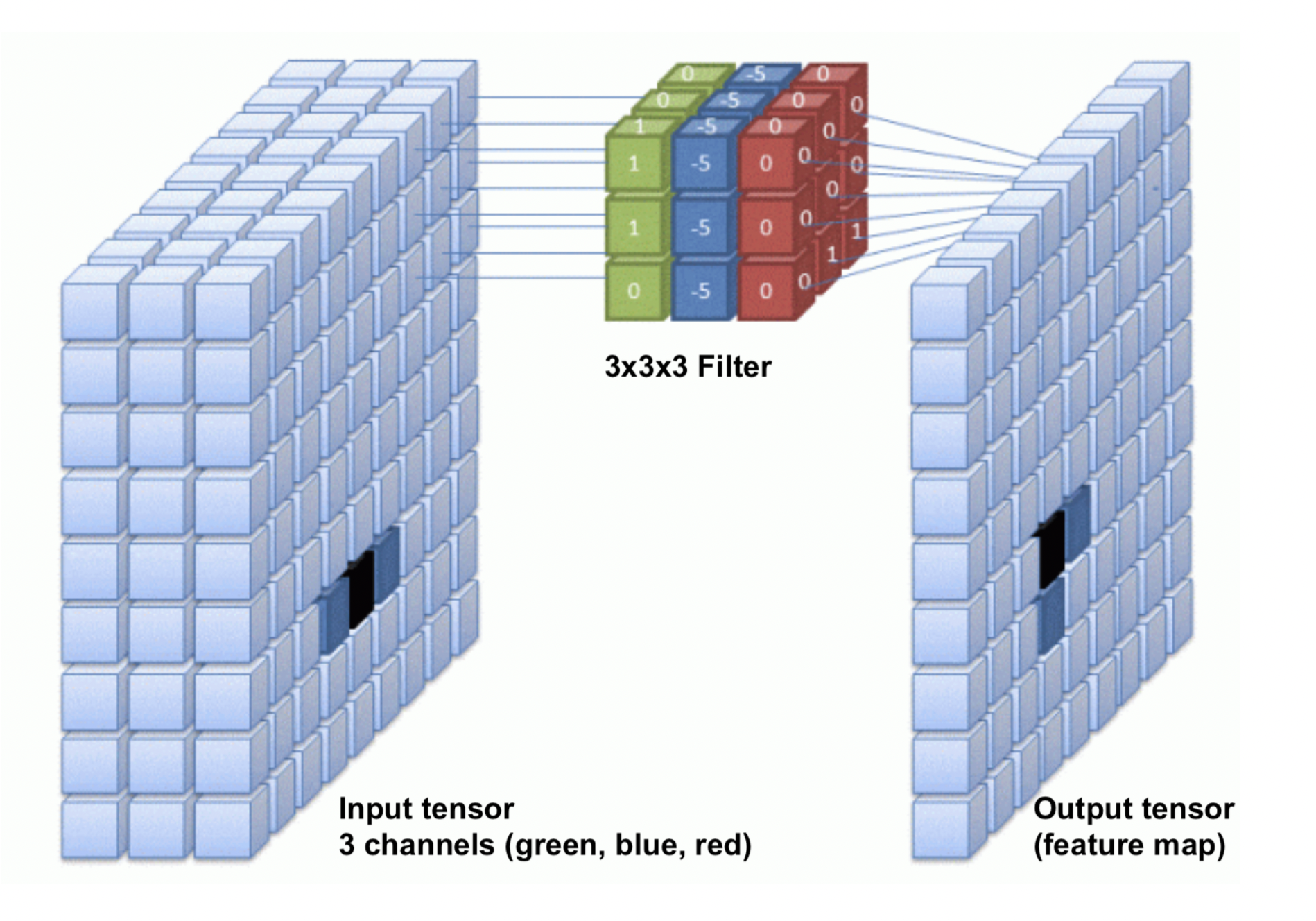
- One filter is not sufficient to detect all relevant patterns in an image
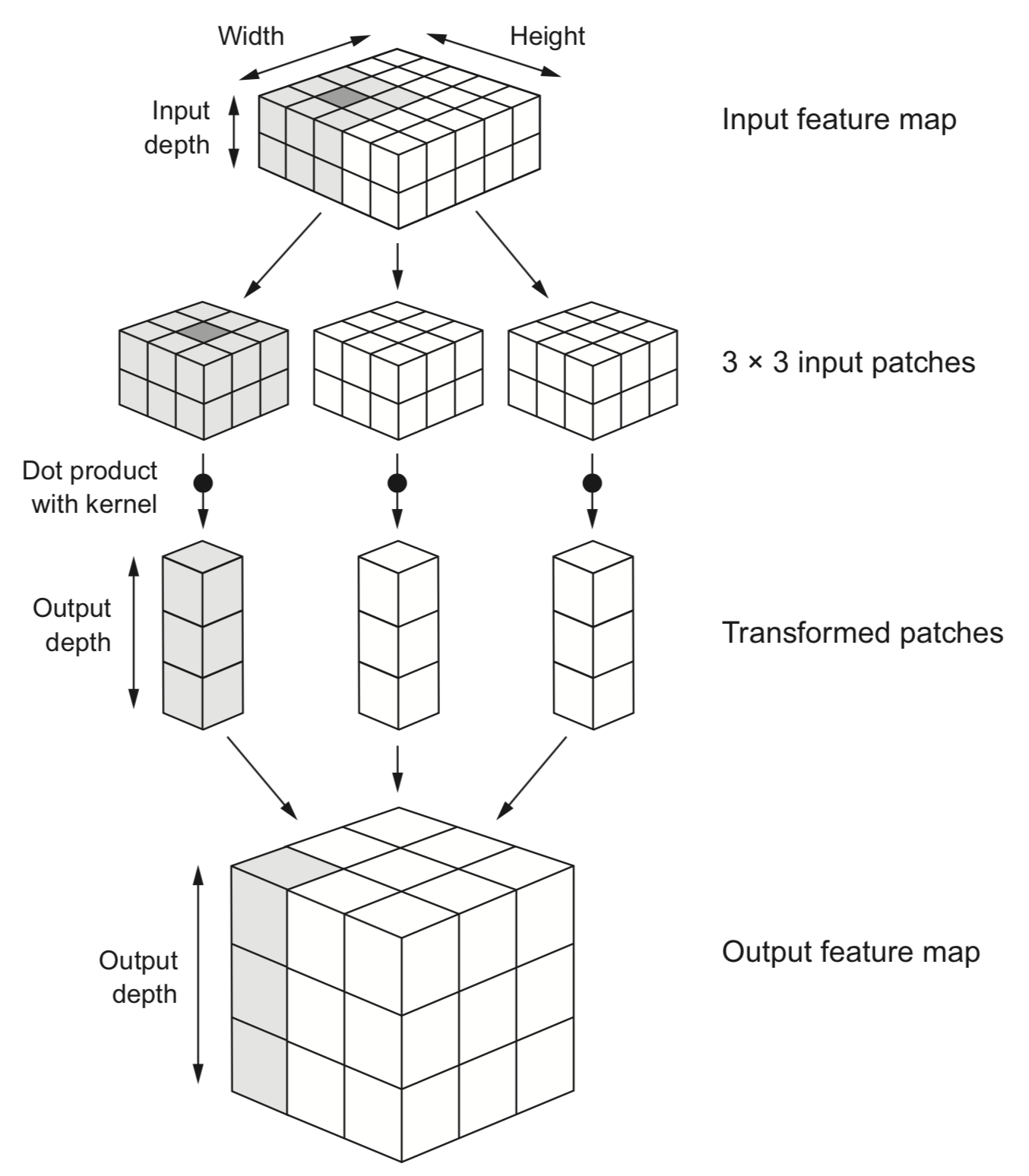
- A convolutional layer applies and learns $d$ filters in parallel
- Slide $d$ filters across the input image (in parallel) -> a (1x1xd) output per patch
- Reassemble into a feature map with $d$ 'channels', a (width x height x d) tensor.
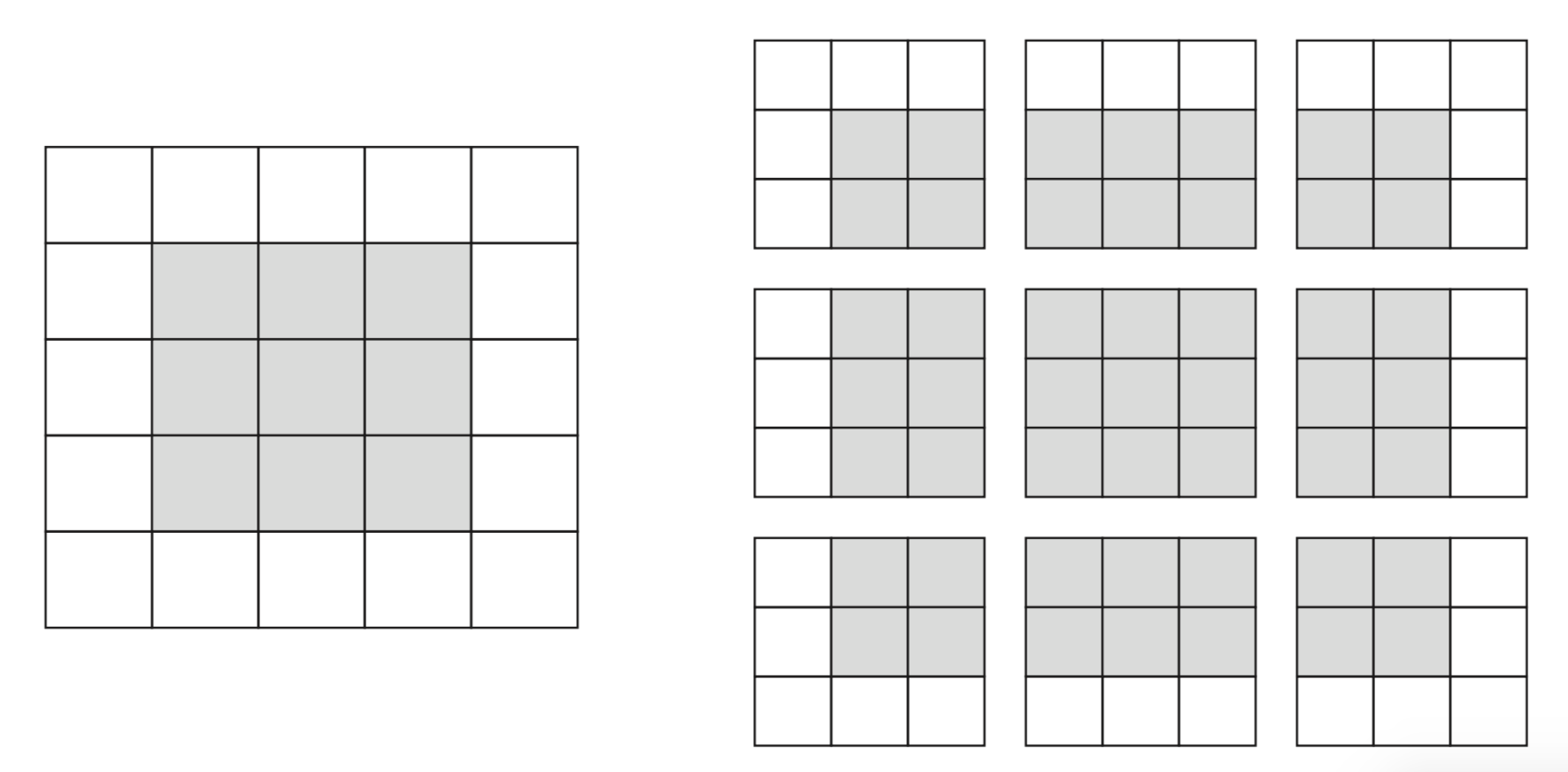
Border effects (zero padding)¶
- Consider a 5x5 image and a 3x3 filter: there are only 9 possible locations, hence the output is a 3x3 feature map
- If we want to maintain the image size, we use zero-padding, adding 0's all around the input tensor.
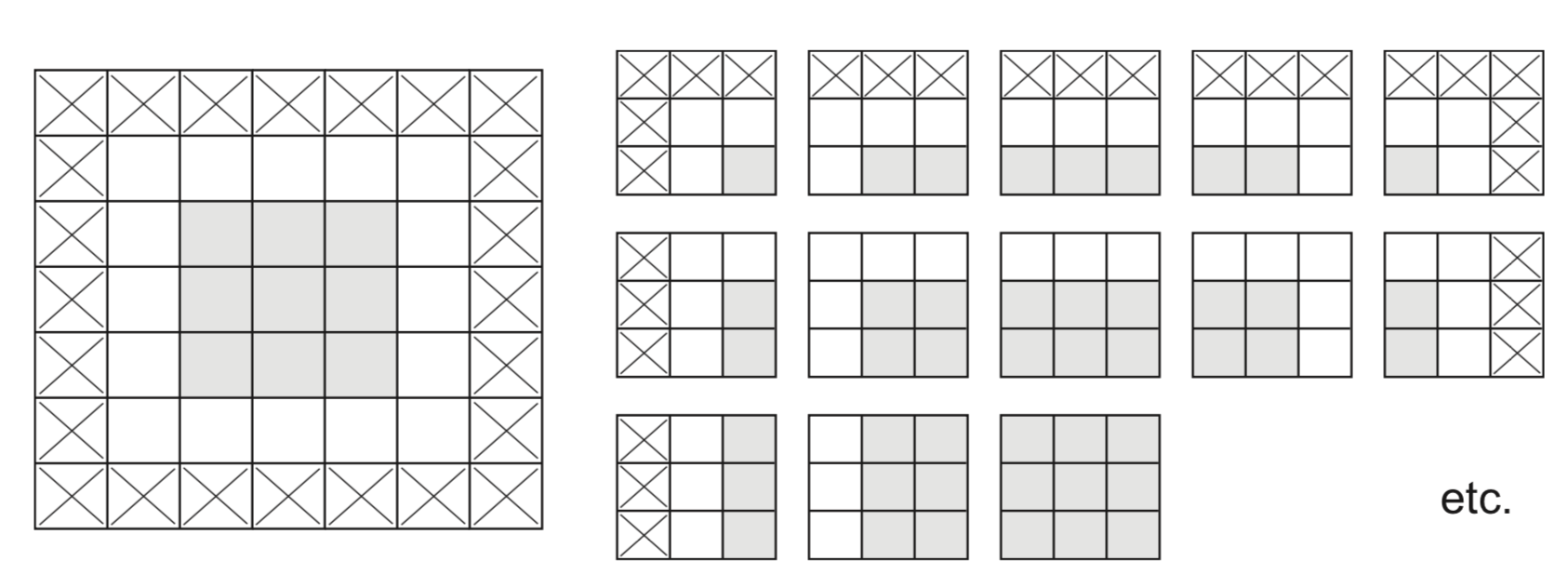
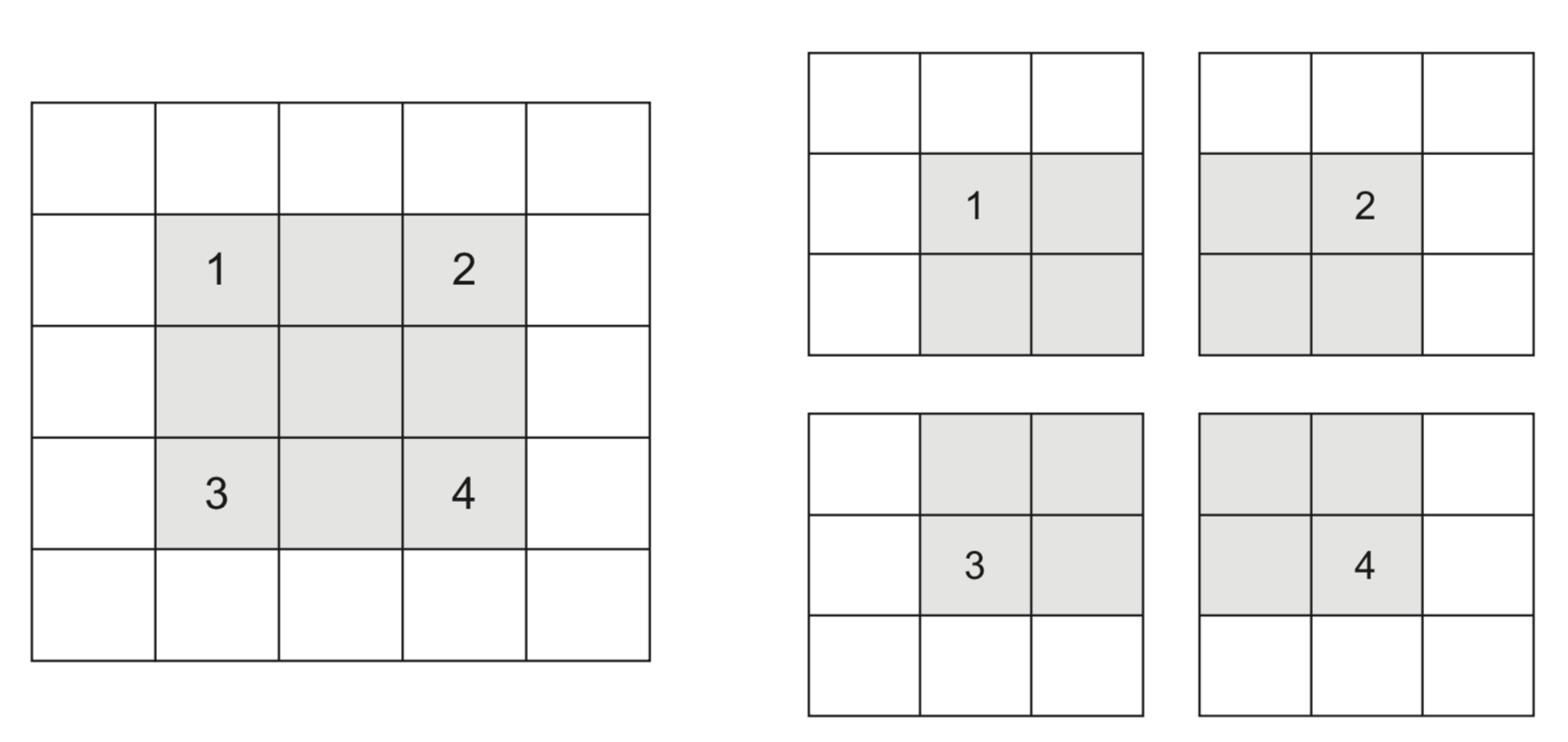
Undersampling (striding)¶
- Sometimes, we want to downsample a high-resolution image
- Faster processing, less noisy (hence less overfitting)
- Forces the model to summarize information in (smaller) feature maps
- One approach is to skip values during the convolution
- Distance between 2 windows: stride length
- Example with stride length 2 (without padding):
Max-pooling¶
- Another approach to shrink the input tensors is max-pooling :
- Run a filter with a fixed stride length over the image
- Usually 2x2 filters and stride lenght 2
- The filter simply returns the max (or avg ) of all values
- Run a filter with a fixed stride length over the image
- Agressively reduces the number of weights (less overfitting)

Receptive field¶
- Receptive field: how much each output neuron 'sees' of the input image
- Translation invariance: shifting the input does not affect the output
- Large receptive field -> neurons can 'see' patterns anywhere in the input
- $nxn$ convolutions only increase the receptive field by $n+2$ each layer
- Maxpooling doubles the receptive field without deepening the network


Dilated convolutions¶
- Downsample by introducing 'gaps' between filter elements by spacing them out
- Increases the receptive field exponentially
- Doesn't need extra parameters or computation (unlike larger filters)
- Retains feature map size (unlike pooling)

Convolutional nets in practice¶
- Use multiple convolutional layers to learn patterns at different levels of abstraction
- Find local patterns first (e.g. edges), then patterns across those patterns
- Use MaxPooling layers to reduce resolution, increase translation invariance
- Use sufficient filters in the first layer (otherwise information gets lost)
- In deeper layers, use increasingly more filters
- Preserve information about the input as resolution descreases
- Avoid decreasing the number of activations (resolution x nr of filters)
- For very deep nets, add skip connections to preserve information (and gradients)
- Sums up outputs of earlier layers to those of later layers (with same dimensions)
Example with PyTorch¶
Conv2dfor 2D convolutional layers- Grayscale image: 1 in_channels
- 32 filters: 32 out_channels, 3x3 size
- Deeper layers use 64 filters
ReLUactivation, no paddingMaxPool2dfor max-pooling, 2x2
model = nn.Sequential(
nn.Conv2d(in_channels=1, out_channels=32, kernel_size=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(in_channels=32, out_channels=64, kernel_size=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3),
nn.ReLU()
)
- Observe how the input image on 1x28x28 is transformed to a 64x3x3 feature map
- In pytorch, shapes are (batch_size, channels, height, width)
- Conv2d parameters = (kernel size^2 × input channels + 1) × output channels
- No zero-padding: every output is 2 pixels less in every dimension
- After every MaxPooling, resolution halved in every dimension
========================================================================================== Layer (type:depth-idx) Output Shape Param # ========================================================================================== Sequential [1, 64, 3, 3] -- ├─Conv2d: 1-1 [1, 32, 26, 26] 320 ├─ReLU: 1-2 [1, 32, 26, 26] -- ├─MaxPool2d: 1-3 [1, 32, 13, 13] -- ├─Conv2d: 1-4 [1, 64, 11, 11] 18,496 ├─ReLU: 1-5 [1, 64, 11, 11] -- ├─MaxPool2d: 1-6 [1, 64, 5, 5] -- ├─Conv2d: 1-7 [1, 64, 3, 3] 36,928 ├─ReLU: 1-8 [1, 64, 3, 3] -- ========================================================================================== Total params: 55,744 Trainable params: 55,744 Non-trainable params: 0 Total mult-adds (M): 2.79 ========================================================================================== Input size (MB): 0.00 Forward/backward pass size (MB): 0.24 Params size (MB): 0.22 Estimated Total Size (MB): 0.47 ==========================================================================================
- To classify the images, we still need a linear and output layer.
- We flatten the 3x3x64 feature map to a vector of size 576
model = nn.Sequential(
...
nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, padding=0),
nn.ReLU(),
nn.Flatten(),
nn.Linear(64 * 3 * 3, 64),
nn.ReLU(),
nn.Linear(64, 10)
)
Complete model. Flattening adds a lot of weights!
========================================================================================== Layer (type:depth-idx) Output Shape Param # ========================================================================================== Sequential [1, 10] -- ├─Conv2d: 1-1 [1, 32, 26, 26] 320 ├─ReLU: 1-2 [1, 32, 26, 26] -- ├─MaxPool2d: 1-3 [1, 32, 13, 13] -- ├─Conv2d: 1-4 [1, 64, 11, 11] 18,496 ├─ReLU: 1-5 [1, 64, 11, 11] -- ├─MaxPool2d: 1-6 [1, 64, 5, 5] -- ├─Conv2d: 1-7 [1, 64, 3, 3] 36,928 ├─ReLU: 1-8 [1, 64, 3, 3] -- ├─Flatten: 1-9 [1, 576] -- ├─Linear: 1-10 [1, 64] 36,928 ├─ReLU: 1-11 [1, 64] -- ├─Linear: 1-12 [1, 10] 650 ========================================================================================== Total params: 93,322 Trainable params: 93,322 Non-trainable params: 0 Total mult-adds (M): 2.82 ========================================================================================== Input size (MB): 0.00 Forward/backward pass size (MB): 0.24 Params size (MB): 0.37 Estimated Total Size (MB): 0.62 ==========================================================================================
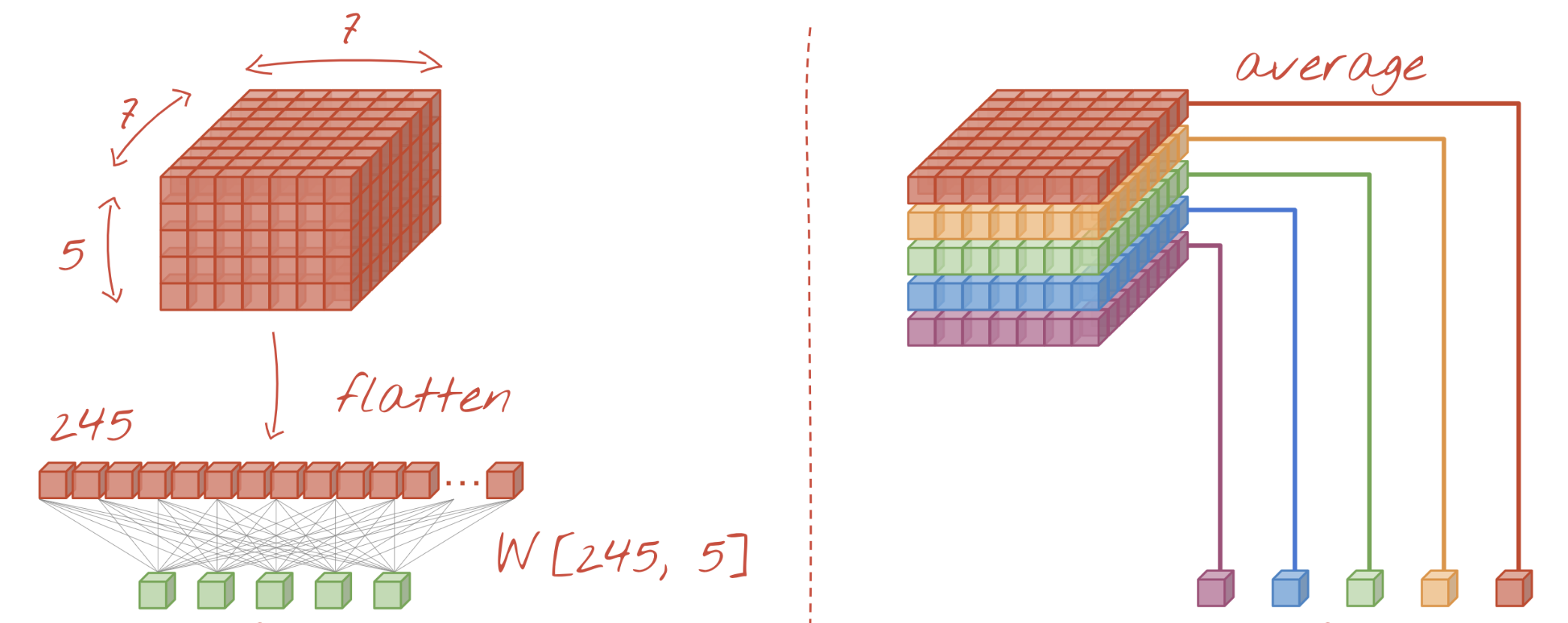
Global Average Pooling (GAP)¶
- Instead of flattening, we do GAP: returns average of each activation map
- We can drop the hidden dense layer: number of outputs > number of classes
model = nn.Sequential(...
nn.AdaptiveAvgPool2d(1), # Global Average Pooling
nn.Flatten(), # Convert (batch, 64, 1, 1) -> (batch, 64)
nn.Linear(64, 10)) # Output layer for 10 classes
- With
GlobalAveragePooling: much fewer weights to learn - Use with caution: this destroys the location information learned by the CNN
- Not ideal for tasks such as object localization
========================================================================================== Layer (type:depth-idx) Output Shape Param # ========================================================================================== Sequential [1, 10] -- ├─Conv2d: 1-1 [1, 32, 26, 26] 320 ├─ReLU: 1-2 [1, 32, 26, 26] -- ├─MaxPool2d: 1-3 [1, 32, 13, 13] -- ├─Conv2d: 1-4 [1, 64, 11, 11] 18,496 ├─ReLU: 1-5 [1, 64, 11, 11] -- ├─MaxPool2d: 1-6 [1, 64, 5, 5] -- ├─Conv2d: 1-7 [1, 64, 3, 3] 36,928 ├─ReLU: 1-8 [1, 64, 3, 3] -- ├─AdaptiveAvgPool2d: 1-9 [1, 64, 1, 1] -- ├─Flatten: 1-10 [1, 64] -- ├─Linear: 1-11 [1, 10] 650 ========================================================================================== Total params: 56,394 Trainable params: 56,394 Non-trainable params: 0 Total mult-adds (M): 2.79 ========================================================================================== Input size (MB): 0.00 Forward/backward pass size (MB): 0.24 Params size (MB): 0.23 Estimated Total Size (MB): 0.47 ==========================================================================================
Run the model on MNIST dataset
- Train and test as usual: 99% accuracy
- Compared to 97,8% accuracy with the dense architecture
FlattenandGlobalAveragePoolingyield similar performance

Cats vs Dogs¶
- A more realistic dataset: Cats vs Dogs
- Colored JPEG images, different sizes
- Not nicely centered, translation invariance is important
- Preprocessing
- Decode JPEG images to floating-point tensors
- Rescale pixel values to [0,1]
- Resize images to 150x150 pixels

Data loader¶
- We create a Pytorch Lightning
DataModuleto do preprocessing and data loading
class ImageDataModule(pl.LightningDataModule):
def __init__(self, data_dir, batch_size=20, img_size=(150, 150)):
super().__init__()
self.transform = transforms.Compose([
transforms.Resize(self.img_size), # Resize to 150x150
transforms.ToTensor()]) # Convert to tensor (also scales 0-1)
def setup(self, stage=None):
self.train_dataset = datasets.ImageFolder(root=train_dir, transform=self.transform)
self.val_dataset = datasets.ImageFolder(root=val_dir, transform=self.transform)
def train_dataloader(self):
return DataLoader(self.train_dataset, batch_size=self.batch_size, shuffle=True)
def val_dataloader(self):
return DataLoader(self.val_dataset, batch_size=self.batch_size, shuffle=False)
Model¶
Since the images are more complex, we add another convolutional layer and increase the number of filters to 128.
========================================================================================== Layer (type:depth-idx) Output Shape Param # ========================================================================================== CatImageClassifier [1, 1] -- ├─Sequential: 1-1 [1, 128, 1, 1] -- │ └─Conv2d: 2-1 [1, 32, 148, 148] 896 │ └─ReLU: 2-2 [1, 32, 148, 148] -- │ └─MaxPool2d: 2-3 [1, 32, 74, 74] -- │ └─Conv2d: 2-4 [1, 64, 72, 72] 18,496 │ └─ReLU: 2-5 [1, 64, 72, 72] -- │ └─MaxPool2d: 2-6 [1, 64, 36, 36] -- │ └─Conv2d: 2-7 [1, 128, 34, 34] 73,856 │ └─ReLU: 2-8 [1, 128, 34, 34] -- │ └─MaxPool2d: 2-9 [1, 128, 17, 17] -- │ └─Conv2d: 2-10 [1, 128, 15, 15] 147,584 │ └─ReLU: 2-11 [1, 128, 15, 15] -- │ └─MaxPool2d: 2-12 [1, 128, 7, 7] -- │ └─AdaptiveAvgPool2d: 2-13 [1, 128, 1, 1] -- ├─Sequential: 1-2 [1, 1] -- │ └─Linear: 2-14 [1, 512] 66,048 │ └─ReLU: 2-15 [1, 512] -- │ └─Linear: 2-16 [1, 1] 513 ========================================================================================== Total params: 307,393 Trainable params: 307,393 Non-trainable params: 0 Total mult-adds (M): 234.16 ========================================================================================== Input size (MB): 0.27 Forward/backward pass size (MB): 9.68 Params size (MB): 1.23 Estimated Total Size (MB): 11.18 ==========================================================================================
Training¶
- We use a
Trainermodule (from PyTorch Lightning) to simplify training
trainer = pl.Trainer(
max_epochs=20, # Train for 20 epochs
accelerator="gpu", # Move data and model to GPU
devices="auto", # Number of GPUs
deterministic=True, # Set random seeds, for reproducibility
callbacks=[metric_tracker, # Callback for logging loss and acc
checkpoint_callback] # Callback for logging weights
)
trainer.fit(model, datamodule=data_module)
- Tip: to store the best model weights, you can add a
ModelCheckpointcallback
checkpoint_callback = ModelCheckpoint(
monitor="val_loss", # Save model with lowest val. loss
mode="min", # "min" for loss, "max" for accuracy
save_top_k=1, # Keep only the best model
dirpath="weights/", # Directory to save checkpoints
filename="cat_model", # File name pattern
)
The model learns well for the first 20 epochs, but then starts overfitting a lot!

Solving overfitting in CNNs¶
- There are various ways to further improve the model:
- Generating more training data (data augmentation)
- Regularization (e.g. Dropout, L1/L2, Batch Normalization,...)
- Use pretrained rather than randomly initialized filters
- These are trained on a lot more data
Data augmentation¶
- Generate new images via image transformations (only on training data!)
- Images will be randomly transformed every epoch
- Update the transform in the data module
self.train_transform = transforms.Compose([
transforms.Resize(self.img_size), # Resize to 150x150
transforms.RandomRotation(40), # Rotations up to 40 degrees
transforms.RandomResizedCrop(self.img_size,
scale=(0.8, 1.2)), # Scale + crop, up to 20%
transforms.RandomHorizontalFlip(), # Horizontal flip
transforms.RandomAffine(degrees=0, shear=20), # Shear, up to 20%
transforms.ColorJitter(brightness=0.2, contrast=0.2,
saturation=0.2), # Color jitter
transforms.ToTensor(),
transforms.Normalize(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5])
])
Augmentation example

We also add Dropout before the Dense layer, and L2 regularization ('weight decay') in Adam
========================================================================================== Layer (type:depth-idx) Output Shape Param # ========================================================================================== CatImageClassifier [1, 1] -- ├─Sequential: 1-1 [1, 128, 1, 1] -- │ └─Conv2d: 2-1 [1, 32, 148, 148] 896 │ └─ReLU: 2-2 [1, 32, 148, 148] -- │ └─MaxPool2d: 2-3 [1, 32, 74, 74] -- │ └─Conv2d: 2-4 [1, 64, 72, 72] 18,496 │ └─ReLU: 2-5 [1, 64, 72, 72] -- │ └─MaxPool2d: 2-6 [1, 64, 36, 36] -- │ └─Conv2d: 2-7 [1, 128, 34, 34] 73,856 │ └─ReLU: 2-8 [1, 128, 34, 34] -- │ └─MaxPool2d: 2-9 [1, 128, 17, 17] -- │ └─Conv2d: 2-10 [1, 128, 15, 15] 147,584 │ └─ReLU: 2-11 [1, 128, 15, 15] -- │ └─MaxPool2d: 2-12 [1, 128, 7, 7] -- │ └─AdaptiveAvgPool2d: 2-13 [1, 128, 1, 1] -- ├─Sequential: 1-2 [1, 1] -- │ └─Linear: 2-14 [1, 512] 66,048 │ └─ReLU: 2-15 [1, 512] -- │ └─Dropout: 2-16 [1, 512] -- │ └─Linear: 2-17 [1, 1] 513 ========================================================================================== Total params: 307,393 Trainable params: 307,393 Non-trainable params: 0 Total mult-adds (M): 234.16 ========================================================================================== Input size (MB): 0.27 Forward/backward pass size (MB): 9.68 Params size (MB): 1.23 Estimated Total Size (MB): 11.18 ==========================================================================================
No more overfitting!

Real-world CNNs¶
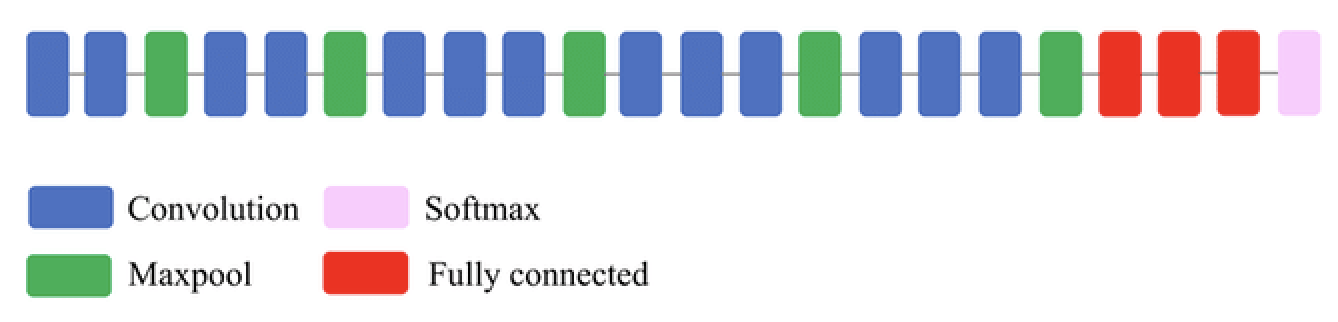
VGG16¶
- Deeper architecture (16 layers): allows it to learn more complex high-level features
- Textures, patterns, shapes,...
- Small filters (3x3) work better: capture spatial information while reducing number of parameters
- Max-pooling (2x2): reduces spatial dimension, improves translation invariance
- Lower resolution forces model to learn robust features (less sensitive to small input changes)
- Only after every 2 layers, otherwise dimensions reduce too fast
- Downside: too many parameters, expensive to train
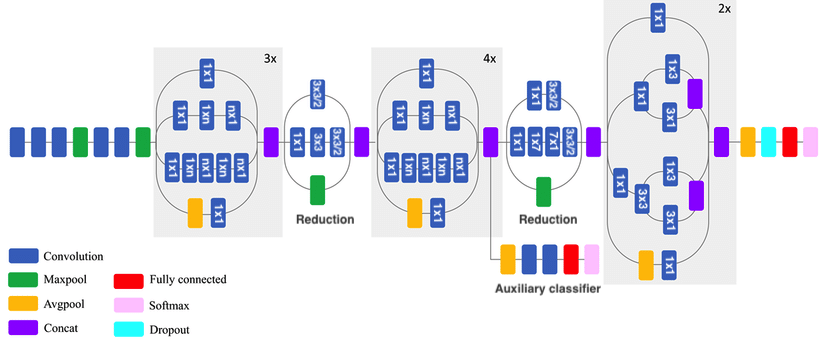
Inceptionv3¶
- Inception modules: parallel branches learn features of different sizes and scales (3x3, 5x5, 7x7,...)
- Add reduction blocks that reduce dimensionality via convolutions with stride 2
- Factorized convolutions: a 3x3 conv. can be replaced by combining 1x3 and 3x1, and is 33% cheaper
- A 5x5 can be replaced by combining 3x3 and 3x3, which can in turn be factorized as above
- 1x1 convolutions, or Network-In-Network (NIN) layers help reduce the number of channels: cheaper
- An auxiliary classifier adds an additional gradient signal deeper in the network

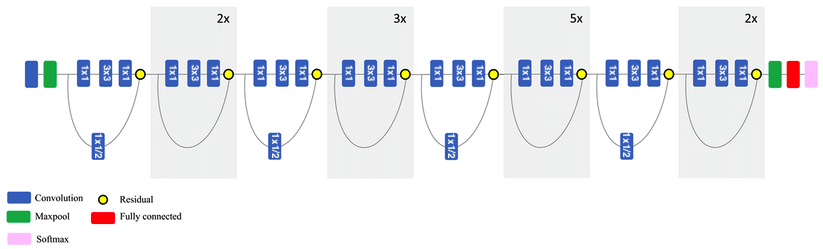
ResNet50¶
- Residual (skip) connections: add earlier feature map to a later one (dimensions must match)
- Information can bypass layers, reduces vanishing gradients, allows much deeper nets
- Residual blocks: skip small number or layers and repeat many times
- Match dimensions though padding and 1x1 convolutions
- When resolution drops, add 1x1 convolutions with stride 2
- Can be combined with Inception blocks
Interpreting the model¶
- Let's see what the convnet is learning exactly by observing the intermediate feature maps
- We can do this easily by attaching a 'hook' to a layer so we can read it's output (activation)
# Create a hook to send outputs to a global variable (activation)
def hook_fn(module, input, output):
nonlocal activation
activation = output.detach()
# Add a hook to a specific layer
hook = model.features[layer_id].register_forward_hook(hook_fn)
# Do a forward pass without gradient computation
with torch.no_grad():
model(image_tensor)
# Access the global variable
return activation
Result for a specific filter (Layer 0, Filter 0)

The same filter will highlight the same patterns in other inputs.

- All filters for the first 2 convolutional layers: edges, colors, simple shapes
- Empty filter activations occur:
- Filter is not interested in that input image (maybe it's dog-specific)
- Incomplete training, Dying ReLU,...


- 3rd convolutional layer: increasingly abstract: ears, nose, eyes

- Last convolutional layer: more abstract patterns
- Each filter combines information from all filters in previous layer

- Same layer, with dog image input: some filters react only to dogs or cats
- Deeper layers learn representations that separate the classes

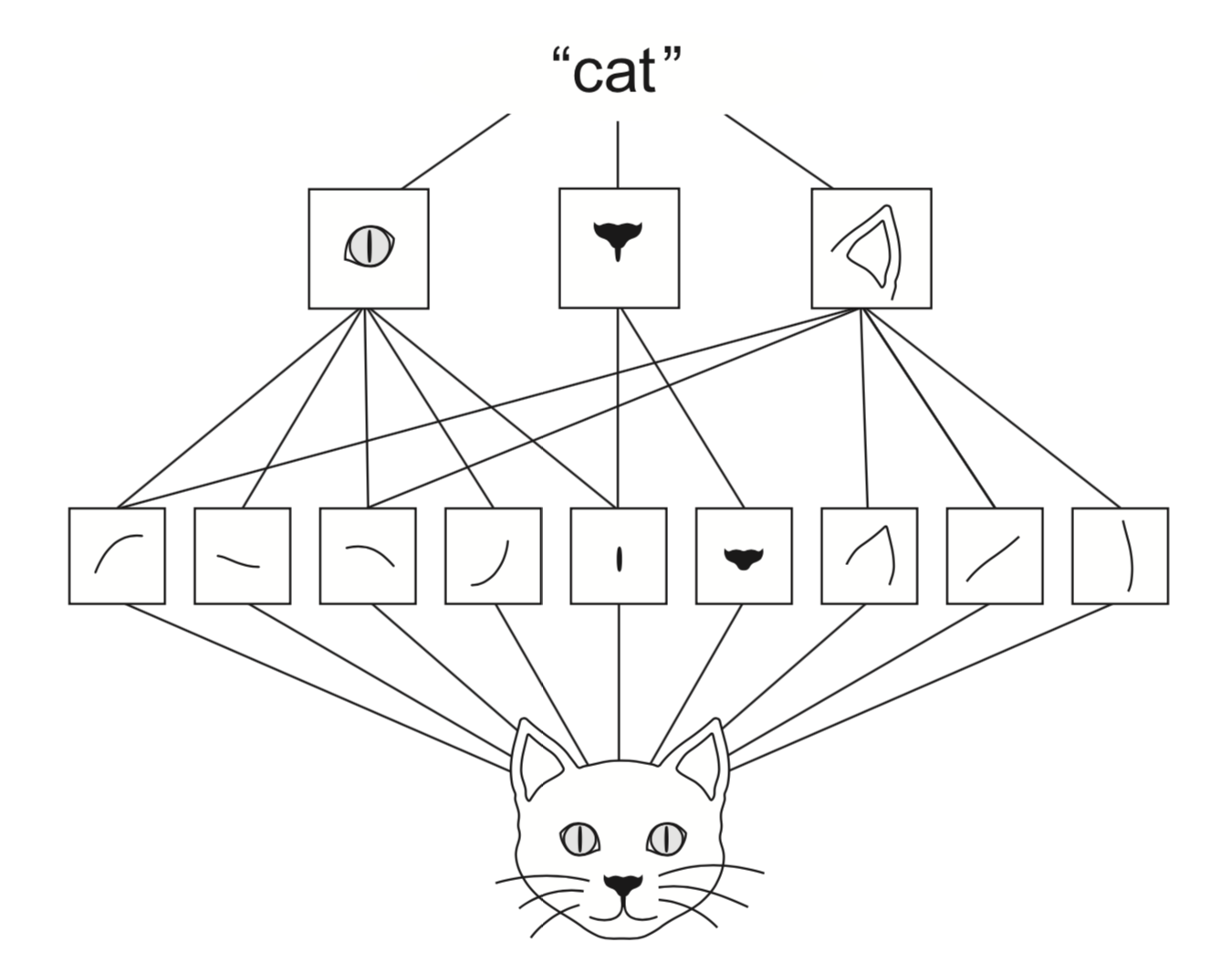
Spatial hierarchies¶
- Deep convnets can learn spatial hierarchies of patterns
- First layer can learn very local patterns (e.g. edges)
- Second layer can learn specific combinations of patterns
- Every layer can learn increasingly complex abstractions
Visualizing the learned filters¶
- Visualize filters by finding the input image that they are maximally responsive to
- Gradient ascent in input space: learn what input maximizes the activations for that filter
- Start from a random input image $X$, freeze the kernel
- Loss = mean activation of output layer A, backpropagate to optimize $X$
- $X_{(i+1)} = X_{(i)} + \frac{\partial L(x, X_{(i)})}{\partial X} * \eta$
Visualization: initialization (top) and after 100 optimization steps (bottom)
- Input image will show patterns that the filter responds to most


Gradient Ascent in input space in PyTorch
# Create a random input tensor and tell Adam to optimize the pixels
img = np.random.uniform(150, 180, (sz, sz, 3)) / 255
img_tensor.requires_grad_()
optimizer = optim.Adam([img_tensor], lr=lr, weight_decay=1e-6)
for _ in range(steps):
# Add our hook on the layer of interest to get the activations
hook = layer.register_forward_hook(hook_fn)
# Run the input through the model
model(img_tensor)
# Loss = Avg Activation of specific filter
loss = -activations[0, filter_idx].mean()
# Update inputs to maximize activation
loss.backward()
optimizer.step()
- First layers respond mostly to colors, horizontal/diagonal edges
- Deeper layer respond to circular, triangular, stripy,... patterns



- We need to go deeper and train for much longer.
- Let's do this again for the
VGG16network pretrained onImageNet
from torchvision.models import vgg16, VGG16_Weights
model = vgg16(weights=VGG16_Weights.IMAGENET1K_V1)
- First layers: very clear color and edge detectors
- 3rd layer responds to arcs, circles, sharp corners



- Deeper: more intricate patterns in different colors emerge
- Swirls, arches, boxes, circles,...



- Deeper: Filters specialize in all kinds of natural shapes
- More complex patterns (waves, landscapes, eyes) seem to appear



- Deepest layers have 512 filters each, each responding to very different patterns
- This 512-dimensional embedding separates distinct classes of images in 'feature space'



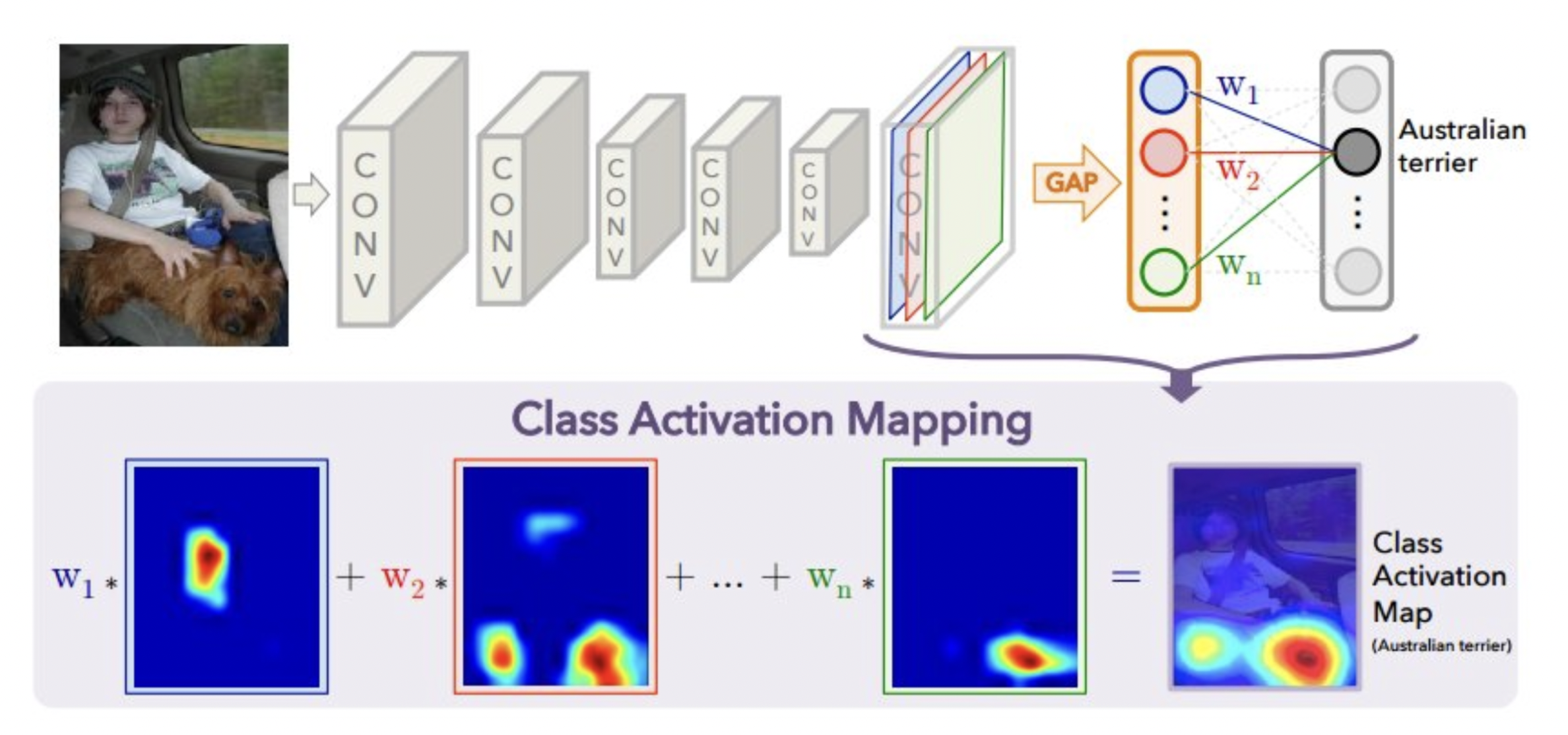
Visualizing class activation¶
- We can also visualize which pixels of the input had the greatest influence on the final classification. Helps to interpret what the model is paying attention to.
- Class activation maps : produces a heatmap over the input image
- Choose a convolution layer, do Global Average Pooling (GAP) to get one output per channel
- Get the weights between those outputs and the class of interest
- Compute the weighted sum of all filter activations: combines what each filter is responding to and how much this affects the class prediction
Implementing gradCAM¶
# Hooks to capture activations and gradients
def forward_hook(module, input, output):
activations = output
def backward_hook(module, grad_input, grad_output):
gradients = grad_output[0]
target_layer.register_forward_hook(forward_hook)
target_layer.register_full_backward_hook(backward_hook)
# Forward pass + get predicted class
pred_class = model(img_tensor).argmax(dim=1).item()
# For that class, do a backward pass to get gradients
model.zero_grad()
output[:, pred_class].backward()
# Compute Grad-CAM heatmap
weights = torch.mean(gradients, dim=[2, 3], keepdim=True) # GAP layer
heatmap = torch.sum(weights * activations, dim=1).squeeze()
ResNet50 model, image of class Elephant, top-8 channels (highest weighst)


Transfer learning¶
- We can re-use pretrained networks instead of training from scratch
- Learned features can be a useful generic representation of the visual world
- General approach:
- Remove the original classifier head and add a new one
- Freeze the pretrained weights (backbone), then train as usual
- Optionally unfreeze (and re-learn) part of the network
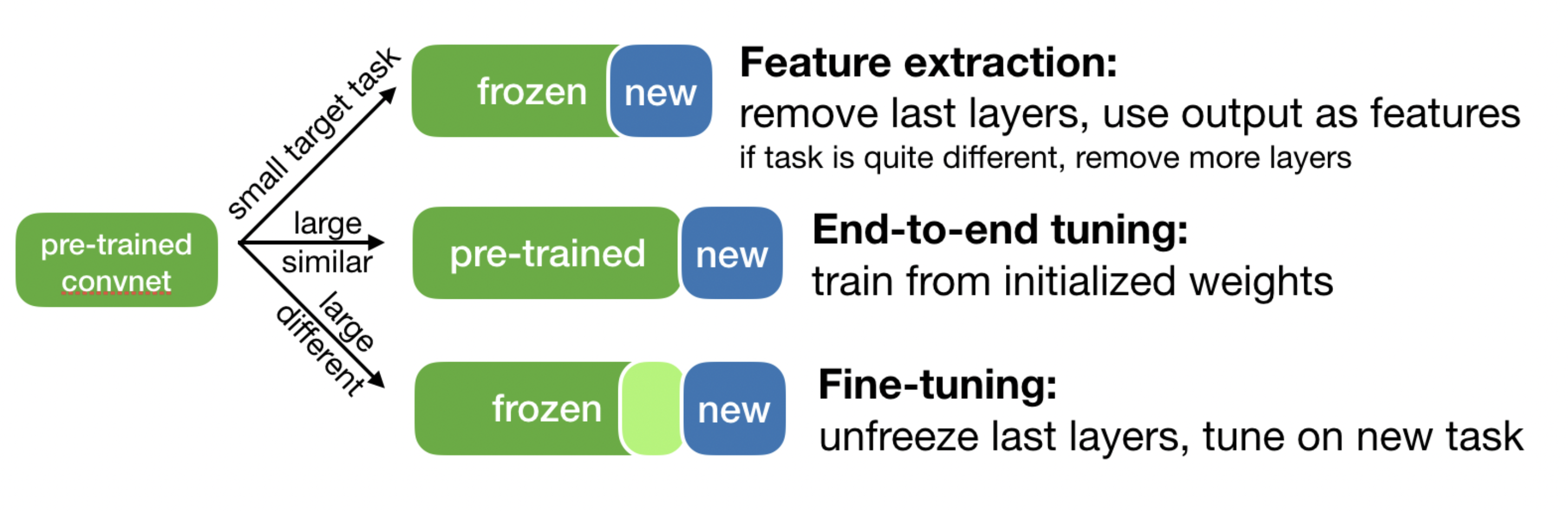
Using pre-trained networks: 3 ways¶
- Fast feature extraction (for similar task, little data)
- Run data through convolutional base to build new features
- Use embeddings as input to a dense layer (or another algorithm)
- End-to-end finetuning (for similar task, lots of data + data augmentation)
- Extend the convolutional base model with a new dense layer
- Train it end to end on the new data
- Partial fine-tuning (for somewhat different task)
- Unfreeze a few of the top convolutional layers, and retrain
- Update only the deeper (more task-specific layers)
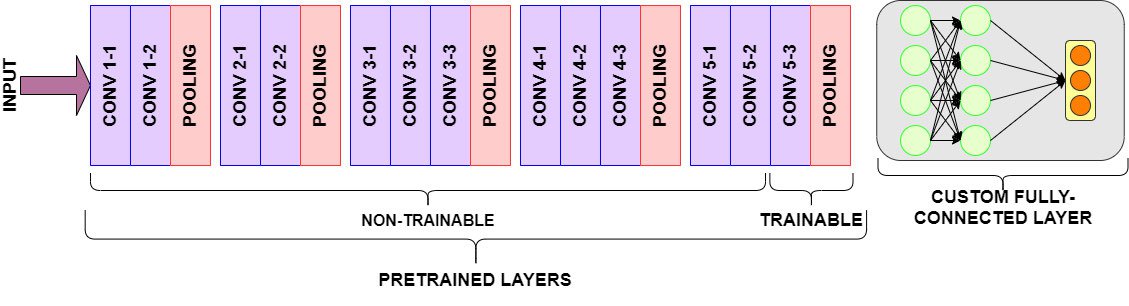
Fast feature extraction¶
- Pretrained ResNet18 architecture, remove fully-connected layers
- Add new classification head, freeze all pretrained weights
def __init__(self):
resnet = resnet18(weights=ResNet18_Weights.IMAGENET1K_V1)
self.feature_dim = resnet.fc.in_features
self.resnet.fc = nn.Identity() # Remove old head
self.classifier = nn.Linear(self.feature_dim, 1) # New head
for param in self.backbone.parameters(): # Freeze backbone
param.requires_grad = False
# Train
def forward(self, x):
features = self.resnet(x)
logits = self.classifier(features)
return logits.squeeze(1)
Fast feature extraction for cats and dogs
- Training from scratch (see earlier): 85% accuracy after 30 epochs
- With transfer learning: 94% in a few epochs
- However, not much capacity for learning more (weights are frozen)
- We could add more dense layers, but are stuck with the conv layers
- 512 trainable parameters

Partial finetuning¶
- Freeze backbone as before
- Unfreeze the last convolutional block
# Freeze conv layers
for param in self.backbone.parameters():
param.requires_grad = False
# Unfreeze last block
for param in self.resnet.layer4.parameters():
param.requires_grad = True
Partial finetuning for cats and dogs
- Performance increases to 96-97% accuracy in few epochs
- No further increase, and much overfitting (even with data augmentation)
- More regularization needed to keep learning
- 8.4 million trainable parameters

End-to-end finetuning¶
- Freeze backbone as before. Unfreeze the last convolutional block
- Use a gentler initial learning rate for the backbone (to avoid destruction)
# Make conv layers trainable
for param in self.resnet.parameters():
param.requires_grad = True
# Use a gentle learning rate for the backbone
def configure_optimizers(self):
return torch.optim.Adam([
{"params": self.resnet.parameters(), "lr": self.hparams.learning_rate * 0.1},
{"params": self.classifier.parameters(), "lr": self.hparams.learning_rate}])
End-to-end finetuning for cats and dogs
- Very similar behavior, maybe slightly better, but also overfitting.
- Our dataset is likely too small to learn a better embedding
- 11.2 million trainable parameters

Take-aways¶
- 2D Convnets are ideal for addressing image-related problems.
- 1D convnets are sometimes used for text, signals,...
- Compositionality: learn a hierarchy of simple to complex patterns
- Translation invariance: deeper networks are more robust to data variance
- Data augmentation helps fight overfitting (for small datasets)
- Representations are easy to inspect: visualize activations, filters, GradCAM
- Transfer learning: pre-trained embeddings can often be effectively reused to learn deep models for small datasets